

- 694.44 KB
- 2022-04-22 13:44:34 发布
- 1、本文档共5页,可阅读全部内容。
- 2、本文档内容版权归属内容提供方,所产生的收益全部归内容提供方所有。如果您对本文有版权争议,可选择认领,认领后既往收益都归您。
- 3、本文档由用户上传,本站不保证质量和数量令人满意,可能有诸多瑕疵,付费之前,请仔细先通过免费阅读内容等途径辨别内容交易风险。如存在严重挂羊头卖狗肉之情形,可联系本站下载客服投诉处理。
- 文档侵权举报电话:19940600175。
'中国科技论文在线http://www.paper.edu.cn康复下肢外骨骼运动控制研究**姜充,王兴松(东南大学机械工程学院,南京,211189)5摘要:动力本文基于动力下肢外骨骼机器人,展开对用于助老、助残下肢外骨骼机器人运动控制的研究,通过实验验证所研究的控制策略及控制算法的可行性,实现康复下肢外骨骼机器人协助截瘫患者恢复行走能力。首先,通过一套无动力外骨骼采集人体穿戴外骨骼典型动作关节轨迹数据;其次,通过对采集的数据进行拟合获取外骨骼机器人运动离线轨迹;然后,设计基于关节输出力矩反馈的轨迹规划算法,在线调整外骨骼关节轨迹;最后,设计PID10控制器控制器对重新规划的轨迹进行跟踪控制,并通过所得的实验数据验证了控制策略的可行性。关键词:机器人;康复;运动控制中图分类号:TP242.315ResearchonMotionControlofRehabilitationLowerLimbExoskeletonJiangChong,WangXingsong(SchoolofMechanicalEngineering,SoutheastUniversity,Nanjing211189)Abstract:Researchonpoweredlowerlimbexoskeleton,thispaperexploresthemotioncontrolofthe20lowerlimbexoskeleton,whichisusedtohelptheelderlyandthedisabled.Theexperimentsarecarriedouttoverifythefeasibilityofthecontrolstrategyandthecontrolalgorithm.Thelowerlimbexoskeletonrobothelpparaplegicpatientsregainwalkingability.Firstly,thetrajectorydataoftheexoskeletonisacquiredbyasetofnon-dynamicexoskeleton.Secondly,theoff-linetrajectoryoftheexoskeletonrobotisobtainedbyfittingtheacquireddata.Then,planthetrajectorybasedonthejoint25outputtorquefeedback.Finally,PIDcontrollerisusedtotrackthere-planningtrajectory,andthefeasibilityofthecontrolstrategyisverifiedbytheexperimentaldata.Keywords:robot;rehabilitation;motioncontrol0引言30随着年龄的增大,人体骨骼逐渐退化,关节磨损严重,韧带韧性和弹性减退,关节活动受到一定程度的限制。老年人会产生不同程度的运动机能障碍,行动的速度、协调能力、静态抗干扰平衡能力以及肌肉力量均成下降趋势。据报道1951-1990年40年间,道路交通事故增加41.3倍。肢体损伤在道路交通事故法医临床鉴定中非常多见。随着现代体育运动不断向高水平竞技运动的方向发展,运动员在训练和比赛中关节损伤几率增加。35当代医学理论和临床医学实践证明,对肢体运动功能的恢复和提高,除了必要的医疗手段外,科学和正确的康复训练是十分有效的。针对患者不同的伤残程度(肌肉损伤、中风、偏瘫、下肢瘫痪),基于一套具有机械动力装置的下肢外骨骼,结合不同病患不同阶段康复训练的需求和人体正常行走步态,研究合理的下肢外骨骼的控制算法并实现帮助患者康复、正常行走,是很有必要的。40本研究的最终目标是实现伤残患者穿戴动力外骨骼平稳舒适行走,由机器人提供患者恢复行走能力的动力,帮助患者完成日常工作、生活行动同时,降低患者行走时的能量消耗,减轻行走作者简介:姜充(1991-),男,硕士研究生,主要研究方向:机械电子通信联系人:王兴松(1965-),男,教授,主要研究方向:机器人与自动化理论和应用;生物机械电子与先进医疗器械;运动控制理论与数控技术;测量技术与传感器.E-mail:xswang@seu.edu.cn-1-
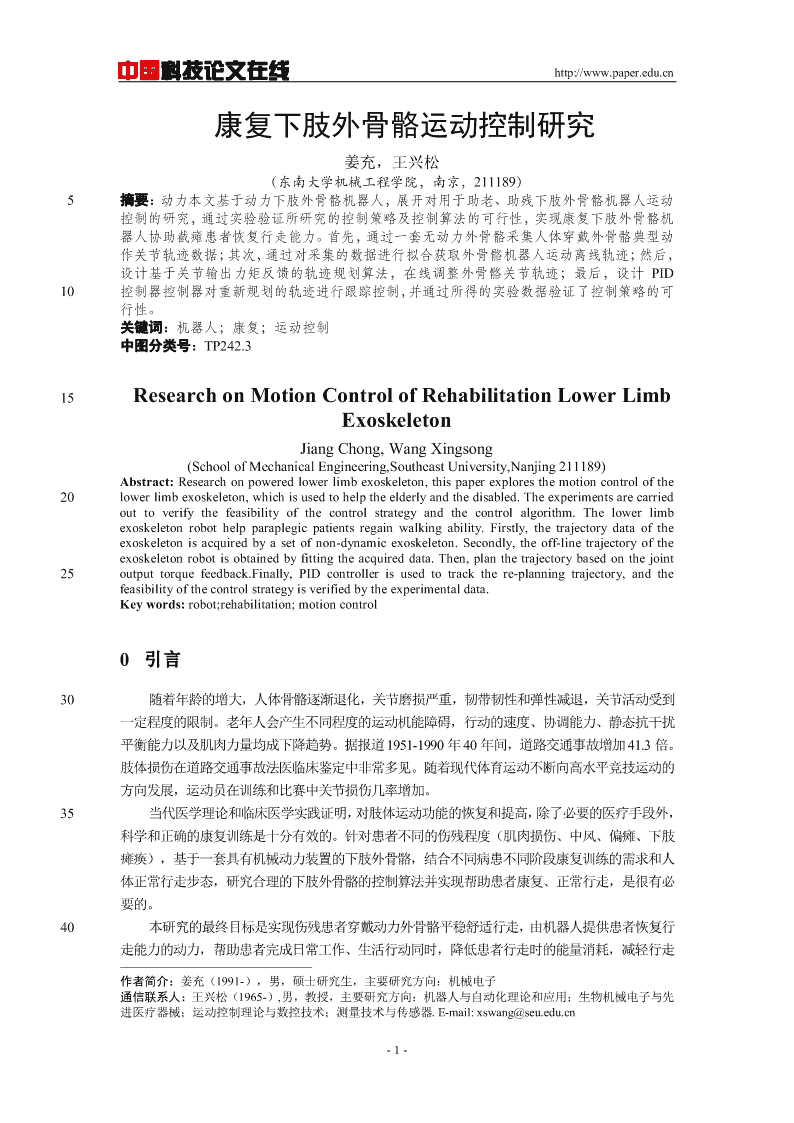
中国科技论文在线http://www.paper.edu.cn的疲劳感。1国内外下肢外骨骼发展现状及分析1.1发展现状45随着科学技术的飞速发展,各学科技术互相交叉渗透,极大的促进了医疗器械的发展。有关外骨骼在康复、助残领域上的应用是机器人研究的热门,并且一直受到各国研究人员的极大关注和重视。目前各国对于下肢康复外骨骼的研究尚停留在研究阶段,只有极少型号外骨骼机器人投入到实际应用中。日本筑波大学的HAL机器人(图2)采用了角度传感器、肌电信号传感器和地面接触[1]50力传感器等传感器信息融入到外骨骼的控制当中。HAL拥有混合控制系统,包括自动控制器进行诸如身体姿态的控制,以及基于生物学反馈和预测前馈的舒适助力控制器。图1ReWalk康复外骨骼图2HAL助力外骨骼Fig.1ReWalkExoskeletonFig.2HALExoskeletonHAL将步态周期分为两相:支撑相(SupportPhase)和摆动相(SwingPhase),在膝关节控制方面,把人体简化为倒立摆的模型,并分别对操作者与下肢助力外骨骼建模求出补偿转矩,结合EMG信号中的屈肌信号和伸肌信号,可以估算出膝关节所需的转矩,称之为虚拟转矩。模型55中参数的辨识采用递归最小二乘方(RecursiveLeastSquare)方法求出。在实际控制时通过足底压力信号区分支撑相与摆动相,并在不同的相上采用不同的阻抗调节的方法,具体为:支撑相补偿粘性摩擦与粘性刚度,摆动相补偿转动惯量与粘性摩擦。以色列外骨骼系统提供商ReWalkRobotics研制的ReWalk可穿戴外骨骼设备(图1),帮助腰部以下瘫患者重获行动能力。Rewalk通过倾斜传感技术,控制重心位置的细微变化控制运动,60同时各关节模仿人体自然步态的轨迹,为用户提供适合的行走速度,使得四肢瘫痪者也能够独立行走。Rewalk同时还配备了携带传感器的拐杖辅助操作者在行走过程当中保持平衡和稳定。拐杖的传感器信号用用来微调外骨骼的步态。穿戴ReWalk,患者可以轻松站立、连续行走和停止行走。中科院合肥智能研究所与中国科技大学在国家自然科学基金的支撑下率先开始了下肢-2-
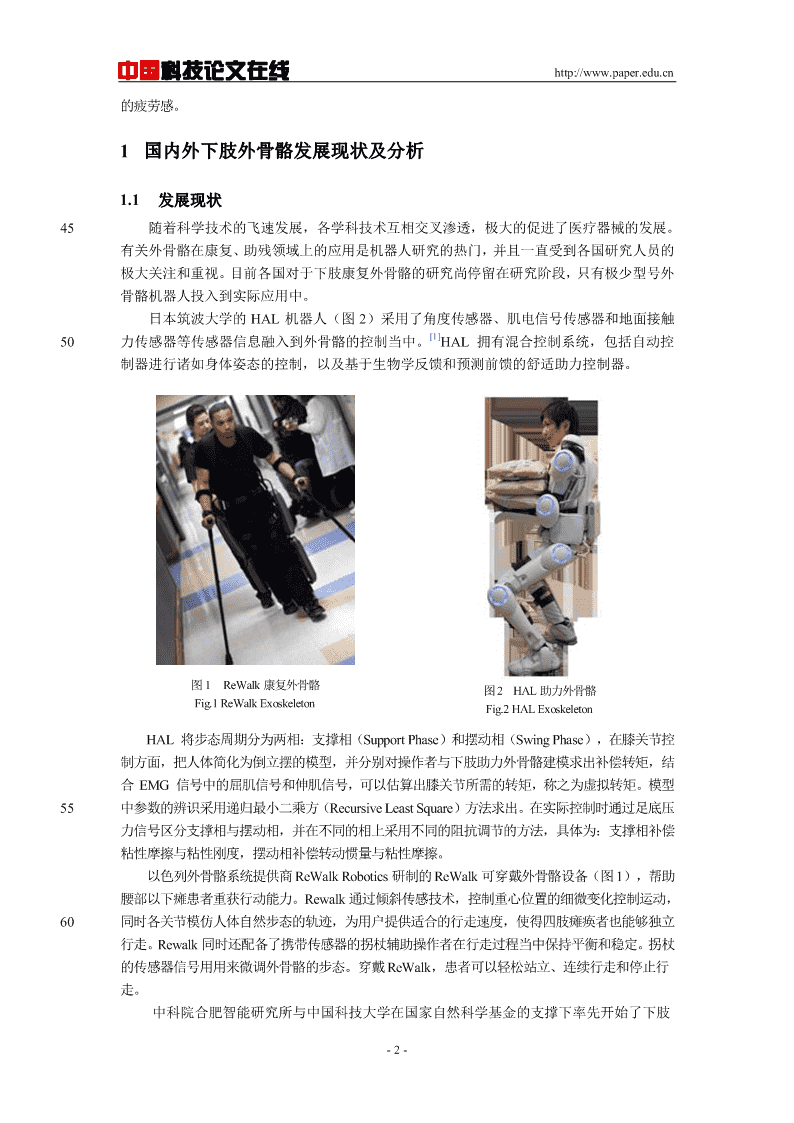
中国科技论文在线http://www.paper.edu.cn65助力外骨骼的研究,设计了用于测量人体大小腿与外骨骼之间的接触力的二维力传感器和测量足底力的一维力传感器和采集特定肌肉群的表面肌电信号(EMG)装置的传感器系统,以人起立、行走过程为主要研究对象,研究了人体下肢意图识别、下肢助力外骨骼控制策略、系[2]统控制平台和下肢助力外骨骼的结构设计方法。该外骨骼的控制策略是减少人机之间的作用力,在外骨骼与操作者之间加上力传感器,一旦检测到人机之间有作用力,就会命令外骨70骼运动减少这种作用力。优点是降低了机械结构的复杂性,缺点是人会有牵扯感,同时控制[3]算法也会变得复杂。同时,采用的肌电信号可以很好反映人的运动意图,然而神经受损的[4]偏瘫患者的肌电信号可能不同或者不可用,在激烈运动下,测量肌电信号的电极容易脱落、易位,长时间运动后,人体出汗也会影响传感器的测量,再者传感器每次都要贴到人体表面,使用不便。75着科学技术的飞速发展,各学科技术互相交叉渗透,极大的促进了医疗器械的发展。有关外骨骼在康复、助残领域上的应用是机器人研究的热门,并且一直受到各国研究人员的极大关注和重视。目前各国对于下肢康复外骨骼的研究尚停留在研究阶段,只有极少型号外骨骼机器人投入到实际应用中。2测量外骨骼机器人获取人体运动状态关节轨迹802.1硬件介绍测量外骨骼机器人与康复外骨骼机器人具有相似的机械结构,保证了人体穿戴两套外骨骼具有相同的约束。为了获取人体各运动状态关节轨迹,采用人体穿戴测量外骨骼机器人进行各种标准运动模式,由位于各关节处的旋转编码器获取轨迹数据。编码器采用500线的欧姆龙编码器(图4),角度精度为360deg/2000=0.18deg。编码器数据通过STM32单片机(图853)的四通道编码器外设读取,实时记录于SD卡中,采样频率为5KHz。图3关节数据采集板图4500线编码器Fig.3JointdatacollectionboardFig.4Omron500lineencorder人体运动测量外骨骼采集人体穿戴测量外骨骼实现四种常见运动方式:A.起立;B.坐下;C.跑步机上1.2m/s步速连续行走;D.拄拐连续行走。采集对象:年龄25(±1)岁,身高170(±5)cm无身体残疾的健康男性,所有样本均自愿配合参与实验数据的采集。-3-
中国科技论文在线http://www.paper.edu.cn2.2数据分析90图5测量外骨骼关节轨迹采集Fig.5Exoskeletonjointdatacollection对的通过起立运动状态的测量可知,当人体获取起立运动信号后,髋关节轻微前屈(40ms~60ms时达到约100°),膝关节向后收起(60ms~100ms时达到约120°),此时人体95呈现一个旋转的‘’N”字型,膝关节内收和髋关节上屈使人体足尖、心脏和重心处于一条垂直线上(图6、图7);随后,膝关节、髋关节向反方向快速运动,帮助人体迅速实现站立运动。整个起立过程持续约1.2s,其中膝关节、髋关节起立做功的过程持续约0.4s。人体坐下运动过程相当于起立运动的逆运动,其轨迹规律也大致相似。12010080°60角度()40200020406080100120140160180100时间(10ms)图6人体穿着外骨骼起立运动膝关节轨迹Fig.6TrajectoryofkneejointwearingExoskeletonstanding12010080°60角度()40200020406080100120140160180时间(10ms)图7人体穿着外骨骼起立运动髋关节轨迹105Fig.7TrajectoryofhipjointwearingExoskeletonstanding当人体穿戴外骨骼在跑步机上连续行走时,人体关节轨迹和人体无约束行走的关节轨迹基本吻合(图8、图9),由于外骨骼的束缚,仅在肢体摆动极限位置时的运动范围受到制-4-
中国科技论文在线http://www.paper.edu.cn约,使得穿戴外骨骼后人体关节运动行程略小于人体自由运动时关节的运动行程。302010°0角度()-10-20-300102030405060110时间(10ms)图8人体穿着外骨骼连续行走运动髋关节轨迹Fig.8TrajectoryofhipjointwearingExoskeletonwalking706050°4030角度()201000102030405060时间(10ms)图9人体穿着外骨骼连续行走运动膝关节轨迹115Fig.9TrajectoryofkneejointwearingExoskeletonwalking当人体穿戴外骨骼拄拐行走时,人体关节轨迹和人体无约束行走关节轨迹差异较大(图10、图11)。其中,由于拐杖起到支撑人体作用,故在支撑相切换至摆动相时,膝关节蹬地瞬间的前伸幅度略小于正常行走时的幅度,膝关节从支撑相切换至摆动相过程中角度保持平稳;另外,由于人手臂相较于正常行走过程,增加了一个将拐杖向前送的过程,从而增长120了髋关节支撑相的范围,在拐杖触地的一瞬间,髋关节角度有轻微向后回收的过程。302010°0角度()-10-20-3001020304050607080时间(10ms)图10人体穿着外骨骼拄拐连续行走运动髋关节轨迹Fig.10TrajectoryofhipjointwearingExoskeletonwalkingwithcanes706050°4030角度()201000102030405060708090时间(10ms)125图11人体穿着外骨骼拄拐连续行走运动膝关节轨迹Fig.11TrajectoryofkneejointwearingExoskeletonwalkingwithcanes-5-
中国科技论文在线http://www.paper.edu.cn3康复外骨骼运动控制实验[5]康复外骨骼机器人的控制一般分为感知层、决策层和执行层三个层次(图12)。感知层包含人的感知、决策和执行行为。其中,患者通过位于安装于拐杖部分的摇杆按钮控制外130骨骼工作在不同的模式下(起立、坐下、连续行走、爬楼梯)。随后感知层输出结果将具体外骨骼将要执行的轨迹输入到决策层;通过测量外骨骼获取的人体各典型运动关节轨迹,此时作为协助截瘫患者行走康复外骨骼运动轨迹的基本依据。决策层通过传感器获取人机交互信息,进一步对外骨骼跟踪的轨迹进行优化修正,最终将当前时刻具体关节运动状态信息输入到执行层;执行层通过伺服控制驱动器实现对关节运动状态的高精度控制。135图12外骨骼机器人控制层Fig.12Controllayersofexoskeleton康复外骨骼的主要实现功能为辅助下肢运动障碍患者连续行走。康复外骨骼的控制策略[6]主要为“离线轨迹,在线调整”,通过采集正常人体的运动轨迹为主要轨迹,由固定于人体140躯干上的姿态传感器俯仰角作为触发信号,引导步态开始,通过电机力矩传感器测量人机交互力,实时采集电机输出力矩,动态修正步态轨迹。直流无刷电机工作在速度模式,对决策层输出的关节轨迹进行位置控制。3.1硬件介绍康复外骨骼机器人采用动力元件为MAXONEC45250w直流无刷电机(图15、图16),-4145电机输出角度通过500线相对旋转编码器测量,保证关节末端角度测量精度为0.461*10°精度,同时每个关节配备一个独立电位器保证位置初始角度测量。电机驱动器内部通过旋转编码器和霍尔传感器形成电机速度闭环,保证驱动器输入和关节速度输出线性关系。机器人控制器采用STM32单片机作为主控(图14),采集关节编码器、电位器、电机力矩等传感器信息,计算各关节输出速度;板载无线通信模块NRF24L01与安装在拐杖(图18)的节150点对接,接收患者意图信息;位于躯干的姿态传感器(图17)通过串口发送躯干俯仰角数据;调试数据通过SD卡存储在本地。完成控制的频率为1KHz(图13)。-6-
中国科技论文在线http://www.paper.edu.cn图13外骨骼机器人控制硬件框图Fig.13Exoskeletoncontrolhardwareblockdiagram155图14外骨骼机器人STM32主控制板Fig.14ExoskeletonSTM32corecontrolboard图15MaxonESCON70/10驱动器图16MaxonEC45直流无刷电机Fig.15MotordriverFig.16Motor-7-
中国科技论文在线http://www.paper.edu.cn图17三轴姿态传感器图18外骨骼拐杖手柄Fig.17IMUmoduleFig.18Exoskeletoncane`handle外骨骼关节力矩通过式估计:160τa=Ct*I*iz*iw*η其中,τa为关节力矩,Ct为电机力矩常数26.3mNm,I为实际电机电流值,通过ESCON70/10驱动器获取(电机电流-12.5A~12.5A,驱动器输出-3.3V~3.3V),iz为直齿轮减速比20,iw为蜗轮蜗杆减速比19.5,η为力矩传动效率,取0.8。实际电机电流通过驱动器输出-3.3V~3.3V信号,通过图19运放电路调理后,由单片机165ADC采集从而求出关节力矩大小。图19力矩模拟信号调理电路Fig.19TorquesignalsconditioningcircuitR170其中,V=Vcc×1,V−=V+,I=(V−V)/R,VAin=V−−I−*R4。因为,+−Torque−3R+R12R=R=2R=2R所以,V=(Vcc−V)/2,V=Vcc−2V。2314,AinTorqueTorqueAin3.2轨迹规划原理通过单纯对人体测量实验采集的轨迹进行跟踪能很好的重现正常人步态,然而人体的每175一步由于地形不同、步速变化造成每一个步态存在微小的差异;同时,当患者穿戴外骨骼行走时,难免遇到意外情形,使得原定轨迹不适用当前步态导致某一瞬间电机输出力矩过大对[7]人体产生牵扯伤害。因此,在决策层适当修正预先定义关节轨迹,重新规划关节的运动轨迹是十分有必要的。-8-
中国科技论文在线http://www.paper.edu.cn首先按照测量采集的标准步态轨迹θini,通过人机动力学模型计算得出所需的外骨骼各180关节理论扭矩τmod,τmod与关节力矩传感器反馈的实际的外骨骼各关节扭矩τa作差,即τ=τa-τmod,τ的值反映了人体对当前标准步态的排斥程度。步态轨迹修正算法则根据排斥程度求得标准步态轨迹的修正量θmod。决策环部分发送至执行环部分的外骨骼各关节轨迹即为θd=θmod+θini。此控制策略采取了已有测量轨迹作为依据,通过对人机接触力的估计动态[8]规划关节轨迹,形成一种半主动控制策略(图20)。半主动控制策略对不同患者的适应性185更强,不仅满足截瘫患者重新直立行走,同时也适用于恢复了部分肢体运动能力的患者进行康复训练。图20人机动力学模型求取人机排斥量框图Fig.20usingman-machinedynamicsmodeltocalculatehumanexclusion190实际控制外骨骼协调人体行走的过程中,实现此半主动控制策略存在一定难度。首先,通过关节力矩传感器较难对外骨骼关节力矩进行准确测量;其次,通过人机动力学模型和标准步态轨迹计算的外骨骼关节力矩,在步速、地形、个体差异等因素影响下很难得出一个准确的值。综上,通过测量外骨骼关节力矩,与人机动力学模型计算关节力矩相差求取人体对步态排斥程度较难实现。195为消除计算人体对步态排斥程度计算误差,采取直接采集每一时刻传感器关节力矩值,保存完整步态关节力矩信息来取代人机动力学模型计算结果。具体算法为:采集当前t时刻关节力矩信息τ(n+1,t),并与之前步态周期相同时刻的力矩信息τ(n,t)融合,通过算法d调整后的力矩信息τ(n+1,t)存入SD卡中,作为此后关节理想力矩τ的依据;同时将dmod本次关节力矩于理想力矩做差,作为步态轨迹修正算法的输入τ。理想力矩轨迹的信息存out200入SD中,断电得以保持,从而达到力矩理想轨迹对患者的适应性更强。τ(n+1,t)=τ(n,t)+f(τ(n,t),τ(n+1,t))(3-1)dddτ(n+1,t)=τ(n+1,t)(3-2)moddτ(n+1,t)=τ(n+1,t)−τ(n+1,t)(3-3)outmod为了便于计算,此处的力矩轨迹融合算法采用简单的加权平均值:205f(τ,τ)=(τ−τ)/5(3-4)dd计算出标准力矩和当前力矩的差值作为人体步态排斥数,作为模糊步态轨迹修正算法的输入,通过模糊算法即求得步态轨迹的修正量(图21)。-9-
中国科技论文在线http://www.paper.edu.cn图21改进后求取人机排斥量框图210Fig.21Advancedmethodtocalculatehumanexclusion以膝关节为例,如图所示为正常步态行走10个周期轨迹及力矩曲线,正常行走时关节力矩轨迹基本保持不变,通过采集关节力矩曲线存入SD卡中作为轨迹规划标准力矩曲线。如图22所示,当步态发生变化时,力矩轨迹发生改变,与标准力矩曲线融合重新生成新的标准曲线,并将当前的力矩差值作为轨迹规划输入计算轨迹修正量,执行层继而对修正后的215步态轨迹进行跟踪。806040(deg)(Nm)20角度力矩0-20-4000.511.522.533.54时间(s)图22力矩反馈重规划关节轨迹Fig.22Jointtrajectoryre-planedbytorquefeedback3.3外骨骼轨迹跟踪控制实验220人体穿戴动力外骨骼机器人实验中,使电机工作在速度模式下,通过对重新规划后的步态关节角度曲线的跟踪,实现外骨骼的正常步态行走。而外骨骼对理想轨迹有效的跟踪也是外骨骼能在主动运动模式下提供助力效果的前提条件(图23)。-10-
中国科技论文在线http://www.paper.edu.cn图23人体动力外骨骼行走实验225Fig.23Poweredexoskeletonwalkingexperiments以膝关节为例设计PID控制器(图24),为了保证在运动过程中平稳,具有一定的抵抗负载的能力,采用典型的位置闭环做外环,速度闭环做内环的控制方案。速度内环由电机驱动器通过编码器采集电机转速反馈保证,速度外环通过膝关节上的角度传感器采集当前膝关节转动角度进行反馈,实现位置闭环。角度传感器、旋转编码器采集当前膝关节角度,计算230理想轨迹角度和实际角度的偏差,送至外环PID控制器,计算控制器的输出量后送至伺服电机驱动器,由驱动器完成速度内环控制,最终实现外骨骼关节位置控制。图24内外闭环PID控制框图Fig.24Double-circuitPIDcontrolblockdiagram235如图25所示,当关节力矩反馈数值与系统存储的关节力矩轨迹数值相差较小时,默认人机排斥量较小,关节理想轨迹几乎不发生改变;当关节力矩轨迹数据与系统存储的关节力-11-
中国科技论文在线http://www.paper.edu.cn矩轨迹数值相差较大时,默认人机排斥量较大,轨迹规划模糊控制器根据力矩的差值重新规划了轨迹跟踪的理想轨迹,同时,力矩的差值修正了关节力矩理想曲线,并重新存入了系统中为下一个控制周期做准备。重新规划后的轨迹60标准关节力矩轨迹实际关节力矩轨迹轨迹修正量预存关节轨迹40实际关节轨迹20degNm0角度(力矩())-20-4000.511.522.533.54240时间()s图25内外闭环PID轨迹跟踪曲线Fig.25PIDtrajectorytrackingcurve4结论本文首先提出了采用被动外骨骼机器人采集人体典型动作关节轨迹的方法,并从测得数245据中提取出人体典型运动的特征,和穿与不穿外骨骼机器人时关节运动的差别;其次,提出了通过关节力矩反馈量计算人机排斥程度的方法,以关节理想力矩轨迹学习算法取代动力学模型计算理想力矩的方法,并验证了次方法的可行性;最后,本文设计了速度位置双闭环PID控制器,通过膝关节为例,对重新规划后的轨迹进行了跟踪,获得了较好的效果。250[参考文献](References)[1]JustinW.Raade,H.Kazerooni,MemberIEEE.AnalysisandDesignofaNovelHydraulicPowerSourceforMobileRobots[J].IEEEtransactionsonautomationscienceengineering.2005,3(2):226-233.[2]郑成闻.基于柔性双足信息的助力机器人行走控制方法研究[D]:[硕士研究生学位论文].安徽:中国科255学技术大学,2011.[3]杨智勇,静张,归丽华等.外骨骼机器人控制方法综述[J].海军航空工程学院学报.2009,24(5):520-526.[4]王令军.康复机器人样机研制及步态控制研究[D]:[博士研究生学位论文].黑龙江:哈尔滨工程大学,2010.[5]Kim,S.,Kazerooni,H.HighSpeedRing-BasedDistributedNetworkedControlSystemforReal-Time260MultivariableApplocation[C].ASMEinternationalmechanicalengineeringcongress.Anaheim,canada:2004,1-8[6]牛彬.可穿戴式下肢步行外骨骼控制机理研究与实现[D]:[硕士研究生学位论文].浙江:浙江大学,2006.[7]陈峰.可穿戴下肢助力机器人动力学建模及其控制研究[D]:[博士研究生学位论文].中国科技大学,2007.[8]张佳帆.基于柔性外骨骼人机智能系统基础理论及应用技术研究[D]:[博士研究生学位论文].浙江:浙江大学,2009.265-12-'
您可能关注的文档
- 基于组氨酸的药物基因载体在癌症诊疗中的应用.pdf
- 基于能量峰值检测的UWB导频模式估计算法.pdf
- 基于负载均衡的VANET跨层贪婪路由算法.pdf
- 基于逆向技术的采煤机导向滑靴设计优化.pdf
- 多功能高强度水凝胶的构建及其生物医学应用.pdf
- 多小区协作上行链路系统中一种以用户为中心的动态分簇算法.pdf
- 大豆花叶病毒抗性鉴定及抗病种质筛选.pdf
- 富氢盐水对东莨菪碱诱导大鼠干眼模型眼表保护作用.pdf
- 小麦抗赤霉病研究进展.pdf
- 慢性阻塞性肺疾病患者CAT评分与心功能相关性研究.pdf
- 抗肿瘤纳米药物的传递障碍及改进策略.pdf
- 拟南芥丝裂原活化蛋白激酶MPK3MPK6参与调控ProPEPs基因的表达.pdf
- 斜齿轮载荷分布计算.pdf
- 新型多靶点化和物EMB的抗肿瘤作用研究.pdf
- 无线传感网中高效可视化算法.pdf
- 日本血吸虫成虫可溶性抗原(SWAP)及虫卵可溶性抗原(SEA)对LX2细胞影响的比较研究.pdf
- 术后认知功能障碍生物标志物的研究进展.pdf
- 板栗壳状CuCo2O4的制备及其电化学催化性能研究.pdf
相关文档
- 施工规范CECS140-2002给水排水工程埋地管芯缠丝预应力混凝土管和预应力钢筒混凝土管管道结构设计规程
- 施工规范CECS141-2002给水排水工程埋地钢管管道结构设计规程
- 施工规范CECS142-2002给水排水工程埋地铸铁管管道结构设计规程
- 施工规范CECS143-2002给水排水工程埋地预制混凝土圆形管管道结构设计规程
- 施工规范CECS145-2002给水排水工程埋地矩形管管道结构设计规程
- 施工规范CECS190-2005给水排水工程埋地玻璃纤维增强塑料夹砂管管道结构设计规程
- cecs 140:2002 给水排水工程埋地管芯缠丝预应力混凝土管和预应力钢筒混凝土管管道结构设计规程(含条文说明)
- cecs 141:2002 给水排水工程埋地钢管管道结构设计规程 条文说明
- cecs 140:2002 给水排水工程埋地管芯缠丝预应力混凝土管和预应力钢筒混凝土管管道结构设计规程 条文说明
- cecs 142:2002 给水排水工程埋地铸铁管管道结构设计规程 条文说明