

- 594.54 KB
- 2022-04-22 13:45:34 发布
- 1、本文档共5页,可阅读全部内容。
- 2、本文档内容版权归属内容提供方,所产生的收益全部归内容提供方所有。如果您对本文有版权争议,可选择认领,认领后既往收益都归您。
- 3、本文档由用户上传,本站不保证质量和数量令人满意,可能有诸多瑕疵,付费之前,请仔细先通过免费阅读内容等途径辨别内容交易风险。如存在严重挂羊头卖狗肉之情形,可联系本站下载客服投诉处理。
- 文档侵权举报电话:19940600175。
'中国科技论文在线http://www.paper.edu.cn转移机构设计及其运动规律研究**曾远,张元勋(重庆大学航空航天学院,重庆400044)5摘要:针对已有“坡道式”和“摇臂式”转移机构承载能力弱的缺点,提出一种由摇臂、摆杆、导轨、悬梯、丝杠滑块机构、锁紧机构以及缓释机构等组成的混合式转移机构(HybridTransferMechanism,HTM)。基于拉格朗日法建立混合式转移机构-巡视器系统(HybridTransferMechanism-InspectorSystem,HTMIS)的动力学数学模型,结合丝杠滑块机构、缓释机构控制10条件建立该系统的动力学控制模型与ADAMS动力学仿真模型。通过对该机构的动力学仿真分析,结果表明:与“玉兔号”转移机构相比,混合式转移机构工作过程要平缓一些。关键词:转移机构;拉格朗日法;动力学;控制中图分类号:TH12215KinematicsResearchandDesignofaTransferMechanismZENGYuan,ZHANGYuanxun(SchoolofAerospaceEngineering,ChongqingUniversity,Chongqing400044)Abstract:Consideringthelowcarrying-capacityoftheexisting‘ramp’and‘rocking’transfermechanism,ahybridtransfermechanism(HTM)consistingofrockerarm,pendulumbar,guiding20rail,hangingladder,screw-slidermechanism,lockingmechanismandreleasemechanismwasproposed.BasedontheLagrangemethod,thekineticsmodelofthehybridtransfermechanism-inspectorsystem(HTMIS)wasestablished.Combiningwiththecontrollingofthescrew-sliderandreleasemechanism,thekineticcontrolmodelandAdamsdynamicsimulationmodeloftheHTMISwereestablished.TheresultshowedthattheHTMworkedmuchsmootherandsteadythanthetransfer25mechanismofYUTU.Keywords:Transfermechanism;Lagrangemethod;Kinetics;Controllingmethod0引言30转移机构是将巡视器转移释放到星球表面的组件,在地外天体探测领域有着重要应用。1970年,苏联“月球车”-1通过布置在其前后的“坡道”跳板移动到月面,这种“坡道式”转移机[1]构在任务过程中始终处于折叠锁定直到解锁形成坡道。1996年,美国“索杰纳”号火星车通过可收卷成圆柱体的“坡道”转移到火星表面,这种圆柱体展开后由两根金属管和织物组成,[2-3]形成类似于“担架”的坡道。2003年,美国“勇气”、“机遇”号火星车在着陆器“花瓣”打开35后“花瓣”之间形成了布状平整通道。这种类似于“蝙幅翼”的通道可以遮蔽着陆点处的障碍[4-5]物,并为火星车提供“转移坡道”。2012年,美国“好奇号”火星车采用“空中吊运”方式来进行转移。下降级进入悬停状态后,释放悬吊“好奇号”的绳索,使“好奇号”降落到火星表面。[6-7]“好奇号”着陆后切断绳索,下降级带着绳索飞走、坠落别处。进入21世纪,我国先后向月球发射了多个“嫦娥”系列探测器。2013年,“嫦娥三号”40实现月面软着陆,它搭载的“玉兔号”巡视器通过“摇臂式”转移机构登陆月面。该转移机构中的摇臂由四连杆机构组成,四连杆机构外侧铰接悬梯组件。巡视器自行行驶到悬梯组件上后,缓释机构释放绳索使四连杆机构向下摆动,从而带动悬梯组件向下运动,最终巡视器驶离悬作者简介:曾远(1989-),男,硕士研究生,主要研究方向:空间机构设计与应用通信联系人:张元勋(1984-),男,讲师,主要研究方向:空间机构设计与应用研究.E-mail:yuanxun.zh@cqu.edu.cn-1-
中国科技论文在线http://www.paper.edu.cn[8]梯组件到达月面。随着我国地外天体探测任务的深入开展,将会有把更加复杂、载荷更大的巡视器投送到45月球或火星的需求,这对转移机构提出了更高的要求。本文在分析总结几种转移机构方案特点的基础上,提出了兼具“坡道式”和“摇臂式”特点的混合式转移机构,为后续转移机构设计提供借鉴。1转移机构基本类型近十几年来我国在月球探测领域取得了世界瞩目的成就,这得益于我国强大的科研攻关[9][10-11]50能力。我国专家学者先后提出了多型转移机构方案,包括“坡道式”“升降式”“端抱式”[12-13][8]“摇臂式”等转移机构方案,其工作原理如图1所示。a.坡道式b.升降式55c.端抱式d.摇臂式图1几种转移机构工作原理示意图Fig.1Mechanicalprincipleofseveraltypestransfermechanism“坡道式”转移机构受限于包络尺寸采用了分段式铰接子梯,段与段之间利用锁紧装置锁住,结构简单,但承载能力有限;“升降式”转移机构利用电机驱动绳索使升降平台由竖直变60到水平状态,并保持该状态,控制要求较高、可靠性有待检验;“端抱式”转移机构承载能力大,但工作过程中采用火工解锁分离巡视器,一旦分离时机不当会有损坏巡视器的风险;“摇臂式”转移机构可靠性高,但工作过程中悬梯组件处于悬臂梁状态,承载能力会有所限制。针对上述转移机构的特点,本文提出混合式转移机构,避免了“坡道式”和“摇臂式”的不足,同时结构简单可靠,承载能力较大。652结构组成及工作原理本文设计的混合式转移机构工作目标为,将距离月面2.0m高着陆器平台上的巡视器转移释放到月球表面。着陆地点应尽可能平整,没有超过200mm深坑以及高度大于200mm的障碍物,着陆地点坡度不能超过[14]。82.1结构组成70混合式转移机构(HTM)由摇臂、摆杆、导轨、悬梯、丝杠滑块机构、锁紧释放机构以及缓释机构等组成(如图2所示),动力源由力矩电机提供。混合式转移机构的主要构成包括:-2-
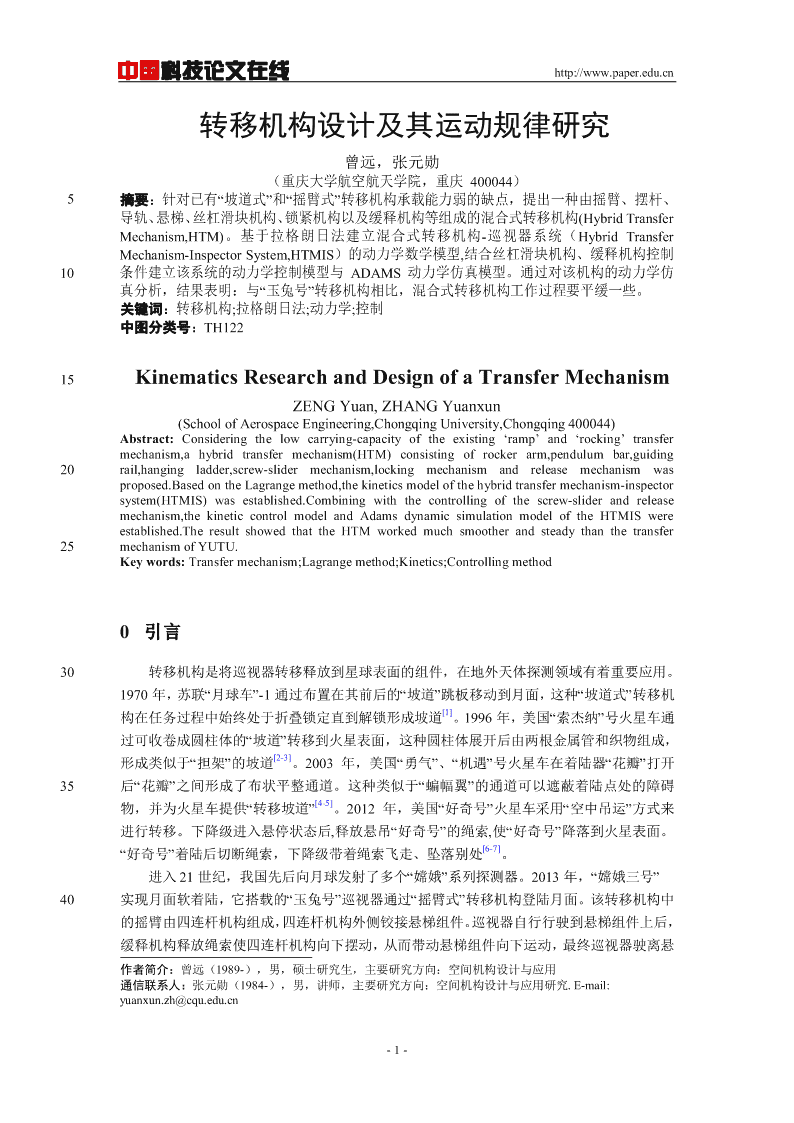
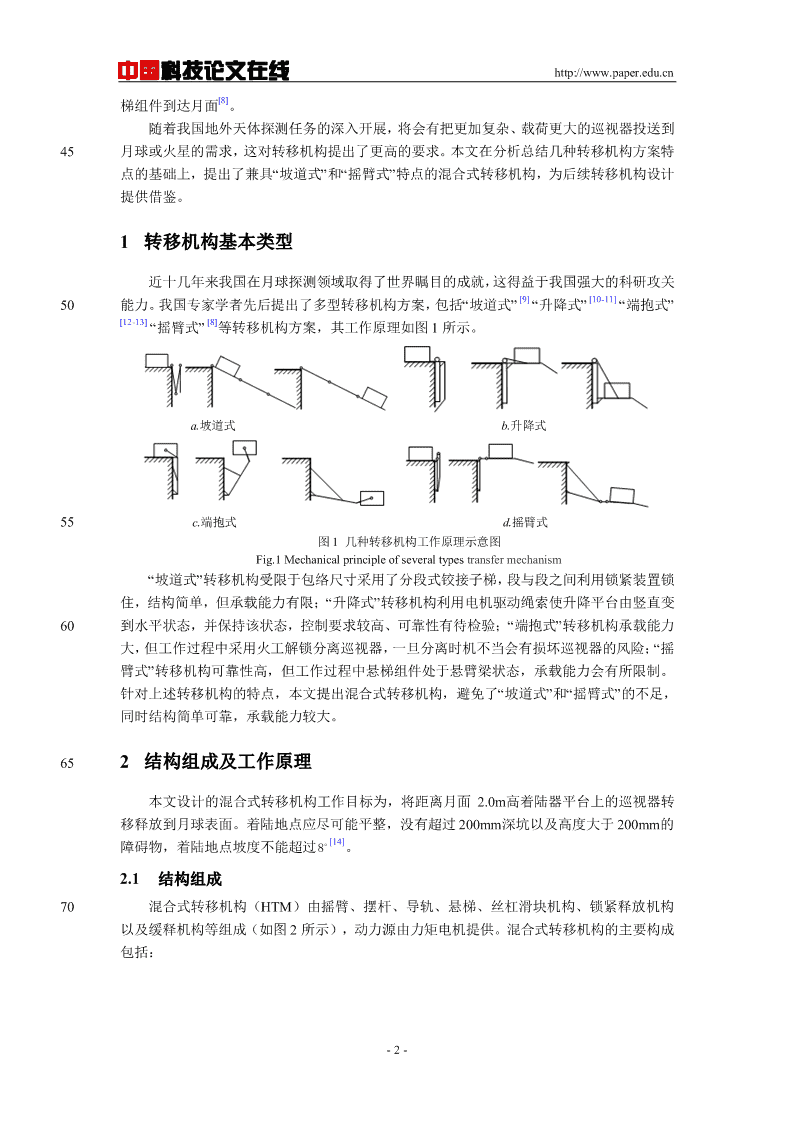
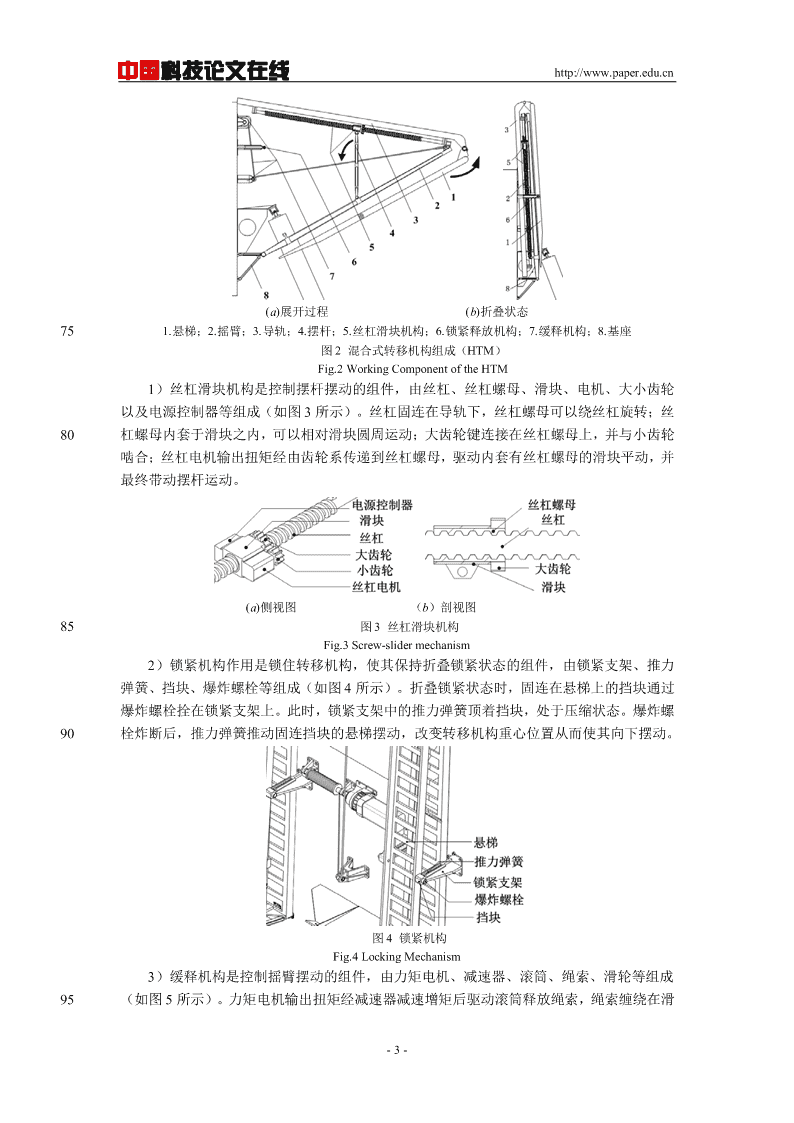
中国科技论文在线http://www.paper.edu.cn(a)展开过程(b)折叠状态751.悬梯;2.摇臂;3.导轨;4.摆杆;5.丝杠滑块机构;6.锁紧释放机构;7.缓释机构;8.基座图2混合式转移机构组成(HTM)Fig.2WorkingComponentoftheHTM1)丝杠滑块机构是控制摆杆摆动的组件,由丝杠、丝杠螺母、滑块、电机、大小齿轮以及电源控制器等组成(如图3所示)。丝杠固连在导轨下,丝杠螺母可以绕丝杠旋转;丝80杠螺母内套于滑块之内,可以相对滑块圆周运动;大齿轮键连接在丝杠螺母上,并与小齿轮啮合;丝杠电机输出扭矩经由齿轮系传递到丝杠螺母,驱动内套有丝杠螺母的滑块平动,并最终带动摆杆运动。(a)侧视图(b)剖视图85图3丝杠滑块机构Fig.3Screw-slidermechanism2)锁紧机构作用是锁住转移机构,使其保持折叠锁紧状态的组件,由锁紧支架、推力弹簧、挡块、爆炸螺栓等组成(如图4所示)。折叠锁紧状态时,固连在悬梯上的挡块通过爆炸螺栓拴在锁紧支架上。此时,锁紧支架中的推力弹簧顶着挡块,处于压缩状态。爆炸螺90栓炸断后,推力弹簧推动固连挡块的悬梯摆动,改变转移机构重心位置从而使其向下摆动。图4锁紧机构Fig.4LockingMechanism3)缓释机构是控制摇臂摆动的组件,由力矩电机、减速器、滚筒、绳索、滑轮等组成95(如图5所示)。力矩电机输出扭矩经减速器减速增矩后驱动滚筒释放绳索,绳索缠绕在滑-3-
中国科技论文在线http://www.paper.edu.cn轮上并拉着摇臂,控制摇臂摆动。图5缓释机构Fig.5ReleaseMechanism1002.2工作原理混合式转移机构(HTM)的工作模式可以分解为折叠、解锁、展开、调姿、转移及着地6个阶段,不同阶段分别由不同的机构形式实现(如图6所示)。(a)折叠(b)解锁(c)展开105(d)调姿(e)转移(f)着地图6混合式转移机构(HTM)工作模式图Fig.6WorkingmodeoftheHTM着陆器在发射、飞行过程中,混合式转移机构(HTM)始终处于折叠锁紧状态(图6(a))。110着陆器在月面软着陆后,伴随着锁紧机构解锁(图6(b)),悬梯在拉力弹簧作用下向上摆动,与导轨锁定形成导轨悬梯组合体(图6(c))。丝杠滑块机构驱动摆杆摆动,使导轨悬梯组合体绕摇臂上端铰链旋转。当导轨悬梯组合体旋转到合适位置时,便形成与着陆器平台接触的坡道(图6(d))。巡视器移动到导轨悬梯组合体上(图6(e)),缓释机构释放绳索使摇臂向下摆动,丝杠滑块机构驱动摆杆沿之前的方向继续摆动。当悬梯组件触地时(图6(f)),缓115释机构和丝杠滑块机构停止工作,巡视器沿导轨悬梯组合体行驶到月面上。混合式转移机构(HTM)的摇臂在缓释机构控制下摆动,摆杆在丝杠滑块机构控制下摆动,两者的摆动带动导轨悬梯组合体运动(坡道)。与“坡道式”相比,导轨悬梯组合体受到缓释绳索拉力作用,这增加了HTM的承载能力;与“摇臂式”相比,导轨悬梯组合体受到摆杆支撑作用,避免了巡视器处于悬臂搭载状态,这增加了HTM的承载能力。-4-
中国科技论文在线http://www.paper.edu.cn1203HTMIS动力学控制模型3.1HTMIS动力学数学模型针对图6中混合式转移机构-巡视器系统(HTMIS)工作模式,建立由(e)状态到(f)状态的动力学数学模型。根据混合式转移机构(HTM)工作原理,将(e)状态到(f)状态动力学建模过程细分为两个阶段。第一阶段缓释机构释放绳索使摇臂向下摆动,丝杠滑块机构工作带125动摆杆摆动,直到摆杆与摇臂接触。第二阶段缓释机构继续释放绳索,直到导轨悬梯组合体触地。如图7所示为HTMIS的坐标系定义图,y方向为着陆器纵向,x和z方向为着陆器横向。为便于建立HTMIS动力学数学模型,对HTMIS中部分部件作简化处理:将导轨和丝杠等效成一根杆,忽略滑块和各铰链尺寸,认为杆和巡视器的质心位于几何中心。如图8所示为HTMIS130动力学模型简图,其中O点为坐标原点(月面上点),O′点为转移机构基座铰链铰接点,O′O高度为h,摇臂O′A长度为L,导轨BC长度为L,摆杆DE的长度为L,H点为滑轮中心123点,且O′H的距离为a。巡视器的质量为m′,月面重力为G,巡视器质心F到导轨BC竖向距离h′,设巡视器运动过程中质心速度为v。O′A,BC,DE杆的质量分别为m,m,m;转动123惯量分别为I,I,I。设运动过程中各杆质心速度分别为v,v,v。设O′A,BC,DE杆123123135与x轴正向夹角为θ,θ,θ。123图7HTMIS坐标系定义图图8第一阶段HTMIS动力学模型简图Fig.7CoordinatedefinitionchartofHTMISFig.81ststagekineticmodeloftheHTMIS进行受力分析时,为便于建立动力学模型,将HTMIS中缓释绳索拉力T作为外力处理。140HTMIS受到的外力还包括着陆器基座铰链对其的支持力N,而该支持力N不对HTMIS做功。由于有非有势力做功,需要利用第Ⅱ类拉格朗日方程来建立系统动力学方程。通过分析可知HTMIS为二自由度系统。为便于建立系统动力学方程,以θ,θ,θ为广123义坐标,结合哈密顿原理和拉格朗日方程建立HTMIS的动力学方程,其中θ,θ为独立广义13坐标,θ为非独立广义坐标。2145设O′A,BC,DE杆的质心坐标分别为(x,y),(x,y),(x,y),设巡视器质心F的坐标112233为(x,y),根据几何关系有:-5-
中国科技论文在线http://www.paper.edu.cn1111xxxxL1cosθ1L1cosθ1+L2cosθ2L1cosθ1+L3cosθ3x21232222=(1)y1y2y3y1111h+L1sinθ1h+L1sinθ1+L2sinθ2h+L1sinθ1+L3sinθ3y2+h′2222设HTMIS工作过程中系统动能为U,位能为V,则12121212121212U=m1v1+I1θ1+m2v2+I2θ2+m3v3+I3θ3+m′v(2)2222222150Vmmmg=++()(hG++hV′′3)123其中,1111V′=(mg+mg+mg+G)Lsinθ+(mg+G)Lsinθ+mgLsinθ123112223332222将(2)(3)式和约束方程(4)式代入含非独立广义坐标的第Ⅱ类拉格朗日方程(5)式,求得系统动力学微分方程(6)式:L1φ(θ)=sin(θ−θ)−sin(θ−θ)=0(4)i32122L2d∂U∂U∂V∂φ(θ)155()−++λ⋅i=Q(i=1,2,3)(5)idt∂θ∂θ∂θ∂θiiii2∂φ(θi)M[θ]+C[θ]+K+λ⋅=Q(i=1,2,3)(6)iii∂θi1221211mL+(m+m′)L+mL+I(m+m′)LLcos(θ−θ)mLLcos(θ−θ)112131122122143133144112M=(m+m′)LLcos(θ−θ)(m+m′)L+I02122122224112mLLcos(θ−θ)0mL+I4313314333110−(m+m′)LLsin(θ−θ)−mLLsin(θ−θ)2212214313311C=(m2+m′)L1L2sin(θ2−θ1)0021mLLsin(θ−θ)00313314111−(m1g+m2g+m3g+G)L1cosθ1−TaLcosθ(a2+L2−2aLsinθ)22211111K=1(mg+G)LcosθQ=02222i01mgLcosθ3332L1−cos(θ−θ)121602L2∂φ(θ)Li=−cos(θ−θ)+1cos(θ−θ)3212∂θ2Li2cos(θ−θ)32当摆杆DE摆动到最大位置时,即摆杆DE与摇臂OA′接触,摇臂、摆杆和导轨三者平行。此时HTMIS变为单自由度系统(如图9所示)。-6-
中国科技论文在线http://www.paper.edu.cn图9第二阶段HTMIS动力学模型简图165Fig.92ndstagekineticmodeloftheHTMIS此时几何关系为1111xxxxL1cosθ1(L1−L2)cosθ1(L1−L3)cosθ1x2123=2222(7)yy1y23y1111h+L1sinθ1h+(L1−L2)sinθ1h+(L1−L3)sinθ1y2+h′2222系统动能表达式为U=1m+m+m+m′v2+1I+I+I2(1)()θ(8)231123122170系统位能表达式为1V=(m+m+m)g(h+Lsinθ)+Gh′(9)123112系统动力学微分方程为121122−1(ML+I)θ+MLcosθ⋅θ=−TaLcosθ(a+L−2aLsinθ)2(10)1111111111422其中,M=m1+m2+m3+m′,I=I1+I2+I3175导轨悬梯组合体与月面接触后,巡视器通过自身动力移动到月面上,如图10所示。图10HTMIS触地时刻Fig.10ThetouchdownmomentoftheHTMIS3.2HTMIS控制模型180本文中的混合式转移机构(HTM)具有两个自由度,分别是摇臂转动自由度,以及摆杆摆动自由度。摇臂转动由缓释绳伸缩来控制,摆杆摆动由滑块丝杠机构来控制。因此,给定缓释绳伸缩函数以及滑块运动函数(如图11所示),转移机构工作过程中巡视器运动过程便确定。-7-
中国科技论文在线http://www.paper.edu.cn185图11HTMIS由(e)到(f)状态控制模型Fig.11ControlmodeloftheHTMISfromstage(e)to(f)为说明缓释绳伸缩函数V(t)与摇臂转动函数θ(t)以及滑块运动函数V(t)与摆杆摆动112函数θ(t)的联系,下面来推导它们之间的关系。3如图12所示为混合式转移机构局部示意图,其中图12(a)表示t和t+Δt时刻摇臂00190的位置,α为O"A杆与O"H的夹角,且α(t)=π3。设t时刻绳AH长为s,t+Δt时刻绳A′H000长为s′。(a)摇臂缓释绳局部(b)摆杆滑块导轨局部图12混合式转移机构(HTM)局部示意图195Fig.12PartialsketchofthesimplifyHTM根据余弦定理有:2222aLcosα(t)=a+L−s′11,(t=t+Δt)(11)22202aLcosα(t)=a+L−s101222aLcosα(t)−s′+s10′=+α(t)=arccos(12)其中,ssV1t2aL1根据几何关系(1)式以及(12)式可以求出摇臂O′A的运动函数θ(t),如(13)式所1200示:22ππ2aLcosα(t)−s′+s10θ(t)=−α(t)=−arccos(13)1222aL1图12(b)表示t和t+Δt时刻导轨和摆杆的位置,β为AE杆与DE杆的夹角,且00β(t)=π3。设t时刻摆杆铰链D与摇臂铰链A的距离为l,t+Δt时刻摆杆铰链D′与摇臂000铰链A的距离为l′。根据余弦定理有:L1222LLcosβ(t)=()+L−l′1332052,(t=t+Δt)(14)L01222LLcosβ(t)=()+L−l1303222LLcosβ(t)−l′+l130′=+β(t)=arccos(15)其中,llV2tLL13根据几何关系(1)式以及(12)(15)式可以求出摆杆DE的运动函数θ(t),如(16)3-8-
中国科技论文在线http://www.paper.edu.cn式所示:2222ππ2aLcosα(t)−s′+sLLcosβ(t)−l′+l10130θ(t)=−α(t)+β(t)=−arccos+arccos(16)3222aLLL1132103.3HTMIS动力学控制模型为保证巡视器平稳安全到达月面,混合式转移机构工作过程应当平缓。本文设计巡视器由图6中的(e)状态到最终移动到月面费时150s。其中,(e)状态到(f)状态的两个阶段分别费时50s,巡视器经由导轨悬梯组合体移动到达月面费时50s。根据3.2节推导的关系式(13)(16)式可知,确定HTMIS的物理参数和摇臂、摆杆初始位置参数,以及控制缓释绳伸缩215速度V(t)以及滑块运动速度V(t),就能精准控制HTMIS在0-100s内的运动。至于100-150s12内巡视器下降速度V(t),则要由100s时导轨悬梯组合体与月面接触关系确定。3本文采用正弦激励来控制缓释绳伸缩以及滑块运动,设计的V1(t)和V2(t)要满足HTMIS由(e)状态到(f)状态两个阶段的运动。根据表1物理参数以及图12中摇臂、摆杆初始位置参数,设计如表2所示驱动关系和驱动函数。220表1混合式转移机构-巡视器系统(HTMIS)物理参数Tab.1ParametersoftheHTMIS参数名称参数数值(mm)备注摇臂L11440.0O"A杆导轨L21400.0BC杆摆杆L3440.0DE杆悬梯L41400.0BI杆基座铰链高度h1057.6OO"高度滑轮基座铰链距离a431.5O"H距离巡视器质心到导轨距离h"480.0F到BC杆距离表2驱动关系和驱动函数Tab.2Actionbodyandfunction驱动对象驱动类型驱动时间(s)驱动函数(mm/s)滑块速度Vt()0-50s11.36sin(0.01πt)1缓释绳速度V(t)0-100s9.52sin(0.02πt)2巡视器速度V(t)100-150s27.82sin(0.02πt)3225将缓释绳伸缩速度函数Vt(),滑块运动速度函数V(t)代入表达式(13)(16),求解12出θ(t),θ(t)。根据几何关系(1)(7)式,求出内混合式转移机构工作过程中巡视器竖13向位移、速度及加速度,并作出对应的曲线图(图15中数值解曲线)。至于缓释绳拉力T大小,则需将θ(t),θ(t)代入动力学微分方程(6)式和(10)式中求解。132304仿真及结果分析为比较混合式转移机构与“玉兔号”转移机构工作特性,利用ADAMS动力学仿真软件分析着陆器水平月面着陆时两者的工作特性。仿真情境为巡视器从距离月面2.0m高着陆器平-9-
中国科技论文在线http://www.paper.edu.cn台移动到转移机构上后,转移机构开始将巡视器转移释放到月球表面。仿真时长150s,其中0-100s内转移机构工作,并在第100s时刻触及月面,100-150s内巡视器通过自身动力移动235到月面。根据表1列举出的HTMIS物理参数以及摇臂、摆杆初始位置参数,建立如图13所示动力学仿真模型。模型由摇臂、摆杆、丝杠滑块机构、导轨、悬梯、滚筒与绳索等部件和巡视[15]器组成。在建立仿真模型时将绳索离散成连续的多段小刚柱,小钢柱之间用轴套力连接。2设置重力场为1634.44kgmms/⋅(月球重力加速度),添加混合式转移机构各部件之间的240几何约束关系。图13HTMIS动力学仿真模型Fig.13DynamicsimulationmodelofHTMIS根据图11所示HTMIS控制模型,分别在滚筒、滑块、巡视器上添加驱动函数(如表3245所示)。动力学仿真结果如图15所示(混合式曲线)。表3驱动关系和驱动函数Tab.3Actionbodyandfunction驱动部件函数类型函数值滑块位移step(time,0,-9.52*sin(0.02*pi*time),50,0)滚筒速度step(time,0,-13.02d*sin(0.01*pi*time),100,0)巡视器速度step(time,0,0,99.99,0.01)+step(time,100,0,100.01,27.82sin(0.02πt))建立如图14所示“玉兔号”转移机构-巡视器系统仿真模型,该模型由拉杆、撑杆、悬梯、250滚筒、缓释绳等部件和巡视器组成。设置月球重力场,添加几何约束关系,在滚筒、巡视器上添加驱动函数(如表4所示)。动力学仿真结果如图15所示(摇臂式曲线)。图14“玉兔号”转移机构-巡视器(TMIS)动力学仿真模型Fig.14DynamicsimulationmodeloftheYutuTMIS255表4驱动关系和驱动函数Tab.4Actionbodyandfunction驱动部件函数类型函数值-10-
中国科技论文在线http://www.paper.edu.cn滚筒速度step(time,0,-36.67d*sin(0.01*pi*time),100,0)巡视器速度step(time,0,0,99.99,0.01)+step(time,100,0,100.01,12.22*sin(0.02πt))综合数值计算结果以及仿真结果,作出如图15所示巡视器竖向位移、速度以及加速度260曲线图。通过图15可知,数值解曲线与混合式曲线趋于一致。对比混合式曲线与摇臂式曲线可知,在0-100s内前者下降高度差值、速度峰值(绝对值)、加速度均值(绝对值)比后者小,这表明混合式转移机构较‘玉兔号’摇臂式转移机构工作过程平缓一些;在100-150s内前者这3个指标值大,但此时转移机构已经触地,巡视器依靠自身动力移动到月面。265(a)竖向位移曲线(b)竖向速度曲线(c)竖向加速度曲线图15数值计算结果与动力学仿真结果Fig.15ResultofNumeralCalculationsandDynamicSimulation需要说明的是在第50s时刻混合式转移机构摆杆摆动到最大位置,与摇臂发生接触,导致图15(b)(c)中的曲线值出现突变。但由于突变值小,不会对巡视器造成大的冲击。2705结论本文针对提出的混合式转移机构,建立了动力学控制模型,分析了转移机构释放巡视器的工作过程,获得了巡视器竖向位移、速度、加速度曲线。混合式转移机构与“玉兔号”转移机构对比表明,前者工作过程较后者平稳,而且前者的承载能力较后者大。275[参考文献](References)[1]WilliamsonM.AimingfortheMoon:TheEngineeringChanllegeofApollo[J].EngineeringScienceandEductionJournal.2002,11(5):164-172.[2]RichardCook.MarsPathfindermissionoperationsconcept[J].ActaAstronautica,1996,39(1-4):71-80.[3]DaleC.Ferguson,JosephC.Kolecki,MarkW,etal.EvidenceforMartianelectrostaticchargingandabrasive280wheelwearfromtheWheelAbrasionExperimentonthePathfinderSojournerrover[J].Journalofgeophysicalresearch,2000,104(E4),8747-8789.[4]D.Cadogan,C.Sandy,M.Grahne.DevelopmentandevaluationoftheMarsPathfinderinflatableairbaglandingsystem[J].ActaAstronautica.2002,50:633-640.[5]司马杭仁.备受青睐的火星探测--著名火星探测器一瞥[J].太空探索,2008,(4):45-47.285[6]高滨.火星探测器着陆技术[J].航天返回与遥感,2009,30(1):1-9,20.[7]刘进军."好奇"号火星车带你游火星[J].科学24小时,2011(2):53-55.[8]刘宾,李新立,柴洪友,等.嫦娥三号着陆器释放与转移巡视器技术[J].中国科学:技术科学,2014,44(6):576-581.[9]杨水林.升降式着陆梯结构设计和分析[D].哈尔滨:哈尔滨工业大学,2006.290[10]张大鹏.自动展开式月球车着陆梯结构设计与分析[D].哈尔滨:哈尔滨工业大学,2008.[11]张则梅.月球着陆器结构设计技术及仿真分析[D].南京:南京航空航天大学,2009.-11-
中国科技论文在线http://www.paper.edu.cn[12]毛君明.月面巡视器转移机构设计与分析[D].长沙:湖南大学,2011.[13]陈哲吾.月面巡视器端抱式转移机构的力学特性分析与优化设计研究[D].长沙:湖南大学,2013.[14]吴伟仁,裴照宇,刘彤杰等.嫦娥三号工程技术手册[M].北京:中国宇航出版社,2013.295[15]李爱平,蒋超平,刘雪梅.以ADAMS为平台的钢丝绳动张力仿真分析[J],现代制造工程,2010,(1):43-46.-12-'
您可能关注的文档
- 茶条槭果酚酸含量、种类及体外生物活性的测定.pdf
- 药物纳米结晶的固体化方法以及产品性质的影响因素.pdf
- 蚀变岩型金矿尾矿火山灰性能的活化及应用研究.pdf
- 蛋白质NEDD化修饰的研究进展及展望.pdf
- 血管内支架植入后的内皮损伤及其修复策略.pdf
- 调节性B细胞对1,3-β-葡聚糖所致过敏性肺炎的调控作用.pdf
- 调速型磁力耦合器气隙特性研究.pdf
- 超临界二氧化碳、氮气和水的射流应力特性研究.pdf
- 超导磁浮危险物质输运系统屏蔽层性能研究.pdf
- 近百年全球平均海平面变化重构研究进展与分析.pdf
- 近红外二区生物成像材料研究进展.pdf
- 适应于SiC BJT的双电源驱动电路的优化设计.pdf
- 针铁矿-细菌-腐殖酸复合体对Pb的吸附行为研究.pdf
- 锁掷酵母油对血脂异常小鼠脂代谢影响的研究.pdf
- 锂离子电池热特性实验与仿真分析.pdf
- 锰胁迫对茶树锰含量和生理变化的影响.pdf
- 长链菊粉对小鼠急性胰腺炎及相关肠道损伤的保护作用研究.pdf
- 长鬣蜥(Physignathus cocincinus)线粒体基因组全序列分析.pdf
相关文档
- 施工规范CECS140-2002给水排水工程埋地管芯缠丝预应力混凝土管和预应力钢筒混凝土管管道结构设计规程
- 施工规范CECS141-2002给水排水工程埋地钢管管道结构设计规程
- 施工规范CECS142-2002给水排水工程埋地铸铁管管道结构设计规程
- 施工规范CECS143-2002给水排水工程埋地预制混凝土圆形管管道结构设计规程
- 施工规范CECS145-2002给水排水工程埋地矩形管管道结构设计规程
- 施工规范CECS190-2005给水排水工程埋地玻璃纤维增强塑料夹砂管管道结构设计规程
- cecs 140:2002 给水排水工程埋地管芯缠丝预应力混凝土管和预应力钢筒混凝土管管道结构设计规程(含条文说明)
- cecs 141:2002 给水排水工程埋地钢管管道结构设计规程 条文说明
- cecs 140:2002 给水排水工程埋地管芯缠丝预应力混凝土管和预应力钢筒混凝土管管道结构设计规程 条文说明
- cecs 142:2002 给水排水工程埋地铸铁管管道结构设计规程 条文说明