

- 589.58 KB
- 2022-04-22 13:47:14 发布

- 1、本文档共5页,可阅读全部内容。
- 2、本文档内容版权归属内容提供方,所产生的收益全部归内容提供方所有。如果您对本文有版权争议,可选择认领,认领后既往收益都归您。
- 3、本文档由用户上传,本站不保证质量和数量令人满意,可能有诸多瑕疵,付费之前,请仔细先通过免费阅读内容等途径辨别内容交易风险。如存在严重挂羊头卖狗肉之情形,可联系本站下载客服投诉处理。
- 文档侵权举报电话:19940600175。
'中国科技论文在线http://www.paper.edu.cn轮毂电机驱动电动汽车差动助力转向与横#摆稳定性联合控制**邹桃,李以农,胡一明5(重庆大学汽车工程学院,重庆400044)摘要:为了改善轮毂电机驱动电动汽车的转向轻便性,结合其各个车轮驱动/制动转矩可进行独立精确控制的特点,建立了差动助力转向控制系统;针对电动汽车行驶稳定性,设计了以车辆质心侧偏角和横标角速度为控制目标的横摆力矩滑模控制器;针对差动助力转向和横摆力矩控制各自的特点和相互影响的关系,建立了差动助力转向与横摆力矩控制的联合控制10系统。最后基于MATLAB/Simulink与Carsim联合仿真平台,利用经典的蛇形绕桩工况进行了人车闭环仿真分析。仿真结果表明:联合控制系统能有效的改善车辆的转向轻便性和行驶稳定性,显著的提高了车辆的操纵性能。关键词:电动汽车;差动助力转向;横摆力矩控制;联合控制中图分类号:U46115DifferentialDriveAssistSteeringandYawStabilityJointControlfortheIn-wheelMotorEVZoutao,LIYinong,HUYiming(AutomotiveEngineeringSchool,ChongqingUniversity,Chongqing400044)Abstract:Adifferentialdriveassiststeering(DDAS)controlsystemwasproposedtoimprovethe20steeringportabilityofIn-wheelMotorElectricVehiclewhichfeaturedtheindependentandaccuratedriving/brakingofeachwheel.Inordertokeepthestabilityofelectricvehicle,aslidingmodecontrolofyawmoment(DYC)wasdevelopedwiththecontroltargetsofsideslipangleandyawrate.ConsideringtherespectivecharacteristicsandmutualinfluenceofDDASandDYC,ajointcontrolwasproposed.Atlasttheperformanceofthejointcontrollerwasdemonstratedthroughco-simulationbetween25MATLAB/SimulinkandCarsim.Theresultrevealsthatthejointcontrollercanimprovethesteeringportabilityandridingstability,significantlyenhancevehiclehandingperformance.Keywords:Electricvehicle;Differentialdriveassiststeering;Yawmomentcontrol;Jointcontrol0引言随着能源危机与环境恶化的日趋严重,节能、环保和安全已经成为当今汽车发展的三大30主题。轮毂电机驱动电动汽车(In-wheel-motorElectricVehicle,IEV)将驱动电机直接安装在驱动轮内,具有力矩响应精确迅速、汽车结构简洁紧凑、能源利用高效多元等独特优势,逐渐[1]成为了电动汽车发展的主要方向。转向轻便性和横摆稳定性直接影响着汽车的驾乘舒适性和行车安全。在传统汽车上为了[2]提高转向轻便性一般都采用电动助力转向系统(ElectricPowerSteering,EPS),利用助力电35机给转向系统直接提供转向助力,虽然取得了较好的转向效果,但是助力电机的引入不仅提基金项目:国家自然科学基金(51275541)作者简介:邹桃(1989),男,硕士研究生,主要研究方向:汽车系统动力学与底盘控制通信联系人:李以农,男,博导,主要研究方向:汽车系统动力学与控制,振动噪声主动控制.E-mail:ynli@cqu.edu.cn-1-
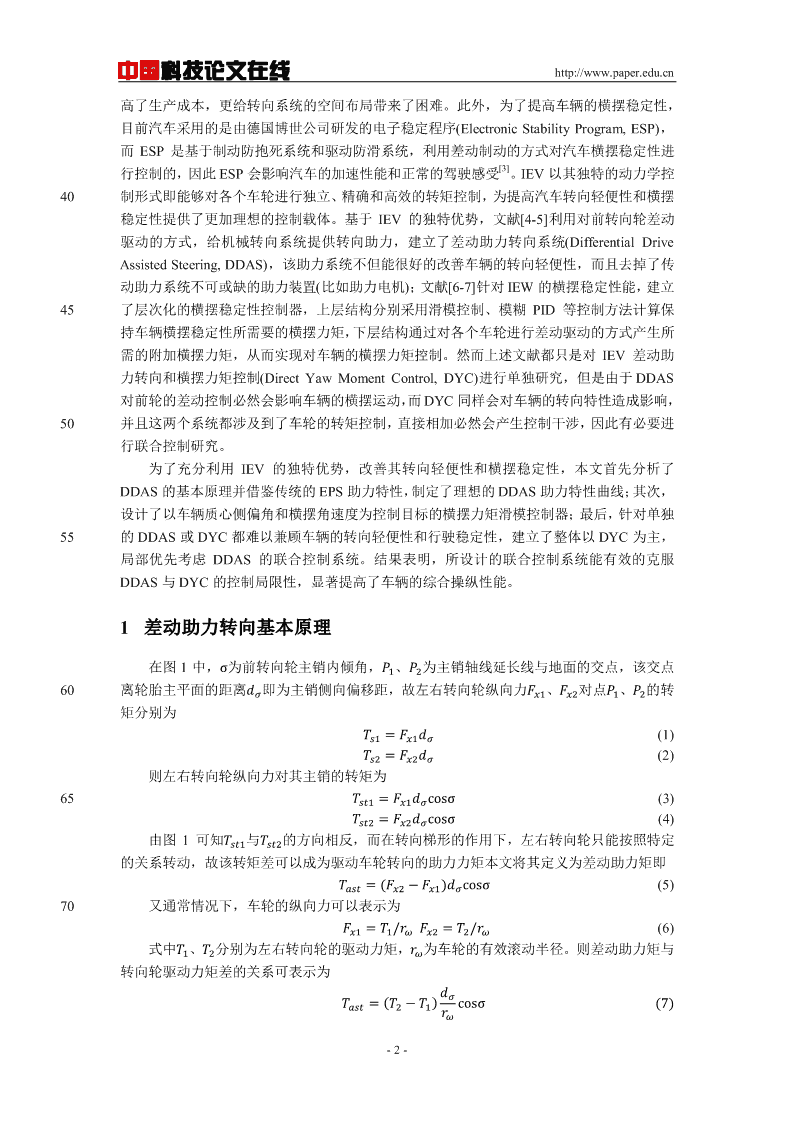
中国科技论文在线http://www.paper.edu.cn高了生产成本,更给转向系统的空间布局带来了困难。此外,为了提高车辆的横摆稳定性,目前汽车采用的是由德国博世公司研发的电子稳定程序(ElectronicStabilityProgram,ESP),而ESP是基于制动防抱死系统和驱动防滑系统,利用差动制动的方式对汽车横摆稳定性进[3]行控制的,因此ESP会影响汽车的加速性能和正常的驾驶感受。IEV以其独特的动力学控40制形式即能够对各个车轮进行独立、精确和高效的转矩控制,为提高汽车转向轻便性和横摆稳定性提供了更加理想的控制载体。基于IEV的独特优势,文献[4-5]利用对前转向轮差动驱动的方式,给机械转向系统提供转向助力,建立了差动助力转向系统(DifferentialDriveAssistedSteering,DDAS),该助力系统不但能很好的改善车辆的转向轻便性,而且去掉了传动助力系统不可或缺的助力装置(比如助力电机);文献[6-7]针对IEW的横摆稳定性能,建立45了层次化的横摆稳定性控制器,上层结构分别采用滑模控制、模糊PID等控制方法计算保持车辆横摆稳定性所需要的横摆力矩,下层结构通过对各个车轮进行差动驱动的方式产生所需的附加横摆力矩,从而实现对车辆的横摆力矩控制。然而上述文献都只是对IEV差动助力转向和横摆力矩控制(DirectYawMomentControl,DYC)进行单独研究,但是由于DDAS对前轮的差动控制必然会影响车辆的横摆运动,而DYC同样会对车辆的转向特性造成影响,50并且这两个系统都涉及到了车轮的转矩控制,直接相加必然会产生控制干涉,因此有必要进行联合控制研究。为了充分利用IEV的独特优势,改善其转向轻便性和横摆稳定性,本文首先分析了DDAS的基本原理并借鉴传统的EPS助力特性,制定了理想的DDAS助力特性曲线;其次,设计了以车辆质心侧偏角和横摆角速度为控制目标的横摆力矩滑模控制器;最后,针对单独55的DDAS或DYC都难以兼顾车辆的转向轻便性和行驶稳定性,建立了整体以DYC为主,局部优先考虑DDAS的联合控制系统。结果表明,所设计的联合控制系统能有效的克服DDAS与DYC的控制局限性,显著提高了车辆的综合操纵性能。1差动助力转向基本原理在图1中,σ为前转向轮主销内倾角,ܲଵ、ܲଶ为主销轴线延长线与地面的交点,该交点60离轮胎主平面的距离݀ఙ即为主销侧向偏移距,故左右转向轮纵向力ܨ௫ଵ、ܨ௫ଶ对点ܲଵ、ܲଶ的转矩分别为ܶ௦ଵ=ܨ௫ଵ݀ఙ(1)ܶ௦ଶ=ܨ௫ଶ݀ఙ(2)则左右转向轮纵向力对其主销的转矩为65ܶ௦௧ଵ=ܨ௫ଵ݀ఙcosσ(3)ܶ௦௧ଶ=ܨ௫ଶ݀ఙcosσ(4)由图1可知ܶ௦௧ଵ与ܶ௦௧ଶ的方向相反,而在转向梯形的作用下,左右转向轮只能按照特定的关系转动,故该转矩差可以成为驱动车轮转向的助力力矩本文将其定义为差动助力矩即ܶ௦௧=(ܨ௫ଶ−ܨ௫ଵ)݀ఙcosσ(5)70又通常情况下,车轮的纵向力可以表示为ܨ௫ଵ=ܶଵ/ݎఠܨ௫ଶ=ܶଶ/ݎఠ(6)式中ܶଵ、ܶଶ分别为左右转向轮的驱动力矩,ݎఠ为车轮的有效滚动半径。则差动助力矩与转向轮驱动力矩差的关系可表示为݀ఙܶ௦௧=(ܶଶ−ܶଵ)cosσ(7)ݎఠ-2-
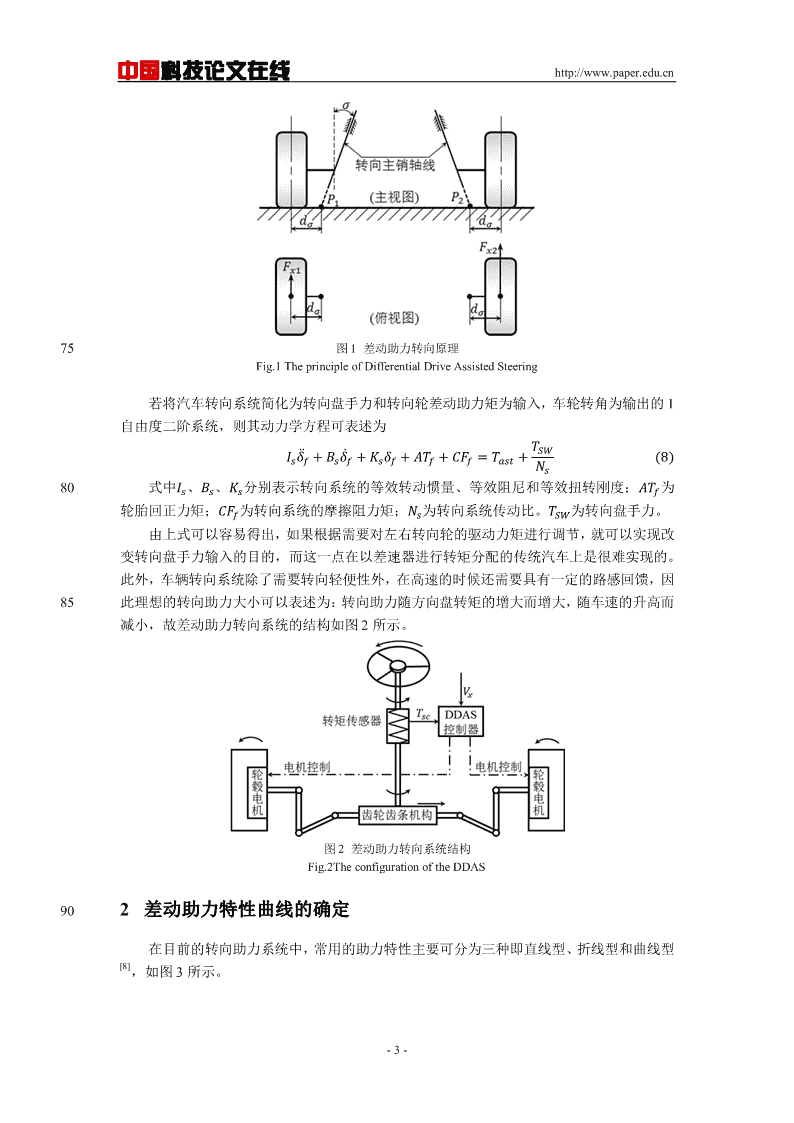
中国科技论文在线http://www.paper.edu.cn75图1差动助力转向原理Fig.1TheprincipleofDifferentialDriveAssistedSteering若将汽车转向系统简化为转向盘手力和转向轮差动助力矩为输入,车轮转角为输出的1自由度二阶系统,则其动力学方程可表述为ܶௌௐܫ௦ߜሷ+ܤ௦ߜሶ+ܭ௦ߜ+ܣܶ+ܥܨ=ܶ௦௧+(8)ܰ௦80式中ܫ௦、ܤ௦、ܭ௦分别表示转向系统的等效转动惯量、等效阻尼和等效扭转刚度;ܣܶ为轮胎回正力矩;ܥܨ为转向系统的摩擦阻力矩;ܰ௦为转向系统传动比。ܶௌௐ为转向盘手力。由上式可以容易得出,如果根据需要对左右转向轮的驱动力矩进行调节,就可以实现改变转向盘手力输入的目的,而这一点在以差速器进行转矩分配的传统汽车上是很难实现的。此外,车辆转向系统除了需要转向轻便性外,在高速的时候还需要具有一定的路感回馈,因85此理想的转向助力大小可以表述为:转向助力随方向盘转矩的增大而增大,随车速的升高而减小,故差动助力转向系统的结构如图2所示。图2差动助力转向系统结构Fig.2TheconfigurationoftheDDAS902差动助力特性曲线的确定在目前的转向助力系统中,常用的助力特性主要可分为三种即直线型、折线型和曲线型[8],如图3所示。-3-
中国科技论文在线http://www.paper.edu.cn图3常用助力特性曲线类型95Fig.3Thecommontypesofassistancecharacteristiccurves由上图可知:直线型相对比较简单,需要调整的参数较少,控制系统容易实现。但是其缺点也比较明显,虽然其助力变化规律能随车速进行调整,但是只能与方向盘转矩成线性变化关系,因此路感单一不能很好的协调转向轻便性与路感之间的矛盾;曲线型则可以同时根100据车速和转向盘力矩的大小对助力幅值和变化曲率进行实时调整,故而操纵手感平顺,较好的兼顾了低速转向轻便性与高速路感之间的需求。但是曲线型需要确定的参数较多,提高了制定控制系统的难度。折线型的优缺点则居于两者之间。为了使DDAS具有较好的转向特性,本文采用助力特性较好,且相对容易实现的二次曲线型助力曲线。其具体的制定过程遵[9]循以下规则:105(1)前轮差动转矩|∆ܶ|与方向盘转矩输入|ܶௌௐ|成正比,与车速大小成反比。(2)为了不致使方向盘在小转角时过于灵敏,开始助力时的方向盘输入转矩|ܶௌௐ|=1ܰ∙݉。(3)考虑到驾驶员最大体力的限制,达到最大助力时的方向盘输入转矩为|ܶௌௐ௫|=7ܰ∙݉。(4)前轮差动转矩|∆ܶ|的最大值,需满足车辆原地转向时的最大阻力矩。其值由下式求得:ீయටܶ=൞ଷ(9)|∆ܶ|௫∙=ܶ−ܶௌௐܰ௦ഘ110式中,ܶ为车辆原地转向阻力矩;݂为轮胎与地面之间的滑动摩擦因子;ܩ为转向轴载荷;ܲ为轮胎胎压。(5)在确定几组常规车速下的助力特性曲线后,其余车速下的助力特性则通过线性差值获得。最终确定的差动助力特性曲线如图4所示。115图4差动助力转向特性曲线Fig.4ThecharacteristiccurvesofDDAS-4-
中国科技论文在线http://www.paper.edu.cn3车辆横摆力矩滑模控制器设计3.1七自由度整车模型120横摆运动和侧向运动是决定车辆稳定性的关键运动特性,因此建立了一个具有横摆、侧向、纵向以及四个车轮回转运动的七自由度整车模型,如图5所示。图5七自由度整车模型Fig.57-DOFwholevehiclemodel125车辆纵向运动方程为:݉ܽ=݉൫ݒ−ሶݒݎ൯=ܨᇱ+ܨᇱ+ܨ+ܨ(10)௫௫௬௫ଵ௫ଶ௫ଷ௫ସ车辆侧向运动方程为:݉ܽ=݉൫ݒ+ሶݒݎ൯=ܨᇱ+ܨᇱ+ܨ+ܨ(11)௬௬௫௬ଵ௬ଶ௬ଷ௬ସ车辆横摆运动方程为:130ܫ௭ݎሶ=ܽ൫ܨᇱ+ܨᇱ൯−ܾ൫ܨ௬ଷ+ܨ௬ସ൯+ܦ(ܨᇱ−ܨᇱ)/2+ܦ(ܨ௫ସ−ܨ௫ଷ)/2(12)௬ଵ௬ଶ௫ଶ௫ଵܨᇱܨ௫cos(ߜ)−sin(ߜ)௫其中,ቈᇱ=൨൨݅=1,2(13)ܨ௬sin(ߜ)cos(ߜ)ܨ௬四轮回转运动ܫ௪߱ሶ=ܶ−ܨ௫ݎఠ(14)式中:ܽ௫和ܽ௬分别为整车的纵向、侧向加速度;ݒ௫和ݒ௬分别为整车纵向、侧向速度;ܽ和ܾ135分别为质心到前后轴的距离;ܦ和ܦ分别为前后轮距;ݎ为横摆角速度;ߜ为前轮转角;ܫ௭为整车绕z轴的转动惯量;ܫ௪为各车轮绕回转轴的转动惯量;߱为各个车轮角速度;ܨ௫和ܨ௬分别为各个轮胎的纵向力和横向力;ܶ为各个车轮所受到的总转矩,且驱动为正制动为负,݅=1,2,3,4表示四个车轮。3.2参考模型140虽然线性二自由度模型表达简单,却包含了车身质量、前后轴侧偏刚度、轴距等反映汽车侧向运动最为关键的几个量,因此,国内外许多学者将线性二自由度车辆模型作为车辆动力学稳定性控制的参考模型,如图6所示。图6线性二自由度车辆模型-5-
中国科技论文在线http://www.paper.edu.cn145Fig.6Linearreferencemodelfor2-DOF根据牛顿第二定律可以得到线性二自由度车辆模型的运动微分方程为:1ۓ݉൫ݒ௬ሶ+ݒ௫ݎ൯=൫݇+݇൯ߚ+൫ܽ݇−ܾ݇൯ݎ−݇ߜݒ௫(15)۔1ଶଶܫ௭ݎሶ=൫ܽ݇−ܾ݇൯ߚ+(ܽ݇+ܾ݇)ݎ−ܽ݇ߜݒە௫式中݇和݇为前后轴的等效侧偏刚度。当车辆处于稳态运行时,车辆的侧向加速度和横摆角速度都等于零即ݒሶ௬=0、ݎሶ=0,故由式(15)可以计算出稳态下车辆的质心侧偏角和横摆150角速度为:2bmavxβδ=+(16)d222lK(1++vk)lK(1v)xrxvxrd=2δ(17)lK(1+v)x22式中ܭ为稳定性因素,本文取值为0.0024s/m。为了更好的限制车辆侧滑,保持行驶方[10]向的一致性故将理想质心侧偏角定义为155ߚௗ=0(18)[11]此外由于路面附着条件的限制,理想横摆角速度还需要满足一下关系式。ఓ|ݎௗ|≤ቚ0.85ቚ(19)௩式中g为重力加速度。因此考虑路面附着系数的限制,理想横摆角速度的取值为vδμgxrd=min2,0.85sgn()δ(20)lK(1+v)vxx160图7反映了理想横摆角速度与车速的关系,实线为等前轮转角线,虚线为等路面附着系数的限制界限,图中直观的表明了理想横摆角速度受到路面所能提供最大支持力的限制。图7理想横摆角速度与车速的关系Fig.7Therelationshipbetweenrandv୶1653.3电机模型由于现代电机制造和控制技术都比较成熟,其瞬时响应速度比车轮的瞬时响应要快几[12]十倍,因此可以将其简化为一个二阶响应系统。其传递函数为ܶ1ܩ(ݏ)==(21)ܶ∗2ߦଶݏଶ+2ߦݏ+1-6-
中国科技论文在线http://www.paper.edu.cn式中,ܶ为给各个电动轮实际输入的驱动/制动电磁转矩,ܶ∗为各电动轮期望的驱动/制动电磁转矩输入。ߦ为与驱动电机参数相关的阻尼比,本文根据永磁同步电机响应特性,170将其取值为0.001。3.4滑模控制器设计滑模控制器的主要任务是计算出使车辆按照理想状态行驶所需要的附加横摆力矩。本文以横摆角速度和质心侧偏角为控制变量,定义滑模控制的切换函数为ݏ=ݎ−ݎௗ+ߣ(ߚ−ߚௗ)(22)175对s求导得ݏሶ=ݎሶ−ݎௗሶ+ߣ(ߚሶ−ߚሶௗ)(23)式中ߣ为滑模面控制参数。根据公式(12)和(13)可得ܫ௭ݎሶ=ܽ൫ܨ௬ଵ+ܨ௬ଶ൯cos(ߜ)+ܽ(ܨ௫ଵ+ܨ௫ଶ)sin(ߜ)−ܾ൫ܨ௬ଷ+ܨ௬ସ൯−ܦ൫ܨ௬ଶ−ܨ௬ଵ൯sin(ߜ)/2+ܯ௭(24)式中ܯ௭为控制器所施加的横摆力矩,其表达式180ܯ௭=ܦ(ܨ௫ଶ−ܨ௫ଵ)cos(ߜ)/2+ܦ(ܨ௫ସ−ܨ௫ଷ)/2(25)根据ݏሶ=0和(24)可以得到等效横摆力矩为ܯ=ܫ௭ሾݎௗሶ−ߣ(ݎ−ݎௗ)ሿ−ܽ൫ܨ௬ଵ+ܨ௬ଶ൯cos(ߜ)+ܾ൫ܨ௬ଷ+ܨ௬ସ൯+ܦ൫ܨ௬ଶ−ܨ௬ଵ൯sin(ߜ)/2(26)为了保证控制系统在受到外界干扰后能在有限的时间内稳定到滑模控制面,还需要给等效横摆力矩添加一个滑模变结构控制律185ݑ௦=−ߢ௦ݏ݃݊(ݏ)(27)ߢ௦为滑模控制系数,通常为了减小控制律中符号函数引起的抖振问题,利用饱和函数ݏܽݐ(s/Δ)代替,饱和函数的定义如下s/Δ|ݏ/∆|≤1ݏܽݐ(s/Δ)=൜(28)ݏ݃݊(s/Δ)|ݏ/∆|>1则滑模控制的最终输出为190ܯ௦=ܯ+ݑ௦=ܯ−ߢ௦ݏܽݐ(s/Δ)(29)4差动助力转向与横摆力矩联合控制策略DDAS与DYC本质上都是利用轮毂电机驱动电动汽车各个车轮驱动力矩能够独立且精确控制这一特点展开的,而这两个控制系统都涉及到了前转向轮的驱动力矩,因此前轮纵向力起到了双重的作用。为了实现在对汽车进行横摆力矩控制的同时,能满足DDAS对前转195向轮驱动力矩的要求,本章对四个车轮差动驱动所需实现的功能进行了前后划分。前转向轮的驱动力矩主要按照DDAS的要求进行控制,而后轮的驱动力矩则配合前轮转矩的变化,使得对四个车轮的转矩分配能满足DYC的需求-7-
中国科技论文在线http://www.paper.edu.cn图8差动助力转向与横摆力矩联合控制结构200Fig.8JointcontrolstructureofDDASandDYC为了使转矩分配简单可行,本文采用等比例分配的方式,前轮转矩修正与助力转矩差∆ܶ之间的关系为∆ܶଵ=−∆ܶ/2;∆ܶଶ=∆ܶ/2(30)205由前轮转矩差产生的横摆力矩ܯி可表示为∆ܶଶ∆ܶଵܦܯி=൬−൰∙∙cos(ߜ)(31)ݎ௪ݎ௪2根据式(30)与(31)可得∆ܶ∙ܦܯி=cos(ߜ)(32)2ݎ௪为了满足对车辆横摆稳定性的控制需求,后轮转矩差产生的横摆力矩ܯோ需要满足以下表达式。ܯோ=ܯிௌ−ܯிቐ∆ܶସ∆ܶଷܦோ(33)ܯோ=൬−൰∙ݎ௪ݎ௪2根据等比例转矩分配原则,后轮转矩修正还具有以下关系210∆ܶସ=−∆ܶଷ(34)根据式(33)与(34)就可以计算出后轮的差动转矩分配情况。5仿真分析由于实验条件的限制,本文采用更为方便快捷的计算机仿真分析方法对本文设计的控制器进行有效性验证。为了提高仿真结果的可信度,采用能基本真实反映车辆运动状态的车辆215动力学商业软件carsim,以某纯电动汽车为对象建立整车模型,其主要动力学参数如表1所示。然后利用matlab/Simulink建立控制器仿真模型进行联合仿真研究。表1纯电动汽车主要参数Tab1Mainparametersofapureelectricvehicle车辆动力学参数符号取值单位整车质量݉1495݇݃绕z轴转动惯量ܫ௭2245݇݃∙݉ଶ质心距前轴距离ܽ1.16݉质心距后轴距离ܾ1.215݉-8-
中国科技论文在线http://www.paper.edu.cn前后轮轮距ܦ/ܦ1.4݉车轮滚动半径ݎఠ0.28݉车轮等效转动惯量ܫ1.97݇݃∙݉ଶ[13]220为了验证DDAS与DYC联合控制系统的控制效果,根据GB/T6323.1-1994标准建立了蛇形绕桩虚拟实验场地,如图9所示。然后分别针对车辆没有控制(withoutcontrol)、单独的差动助力转向控制(DDAS)和横摆力矩控制(DYC)以及两者的联合控制(DDAS+DYC)等四种情况进行了人车闭环对比仿真分析。此外由于方向盘转角输入与方向盘转矩可以反映驾驶强度和驾驶轻便性,车辆横摆角速度和质心侧偏角能够反映车辆的横摆稳定性,而车辆的行225驶轨迹则最终体现了特定实验的完成情况,因此此次仿真实验重点对这几种仿真结果进行了对比分析。仿真车速为蛇形绕桩实验的基准车速65km/h,具体的仿真对比结果如图10所示。图9蛇形试验标桩布置Fig.9Thestakeslayoutforserpentinepiletest230(a)方向盘转角(a)Steeringwheelangle(b)转向盘转矩235(b)Steeringwheeltorque-9-
中国科技论文在线http://www.paper.edu.cn(c)质心侧偏角(c)Side-slipangle240(d)横摆角速度(d)Yawrate(e)车辆运行轨迹(e)Thetrajectoryofvehicle245图10蛇形工况仿真结果Fig.10Thesimulationresultofserpentinepiletest由图10a可以看出,车辆在DDAS单独控制下,虽然前轮差动驱动转矩对车辆产生了一个横摆力矩使其方向转角输入比没有任何控制时略微偏小,但这个横摆力矩并不能使车辆具有理想的横摆响应能力,因此其转角输入相对于施加了横摆力矩控制时仍然要大很多;由-10-
中国科技论文在线http://www.paper.edu.cn250图10b可知,虽然DDAS控制下的转角输入相对较大,但其方向盘转矩在预期的助力特性的控制下,能够根据需要对方向盘转矩进行调节。反观车辆在单独的DYC作用下,虽然有效的保持了车辆的横摆稳定性,大幅度降低了方向盘转角输入,但由于其控制过程只考虑了车辆的横摆稳定性,因此车轮差动驱动的某些时刻给转向系统产生了较大的转向阻力,产生了不必要的转向冲击,给原本应该较小的方向盘转矩带来了较大的波动,即产生了方向盘“打255手”现象。综合以上两图可以得出,在联合控制下,无论是方向盘转角输入还是转矩变化都得到了很大的改善,取得了良好的控制效果。图10c~10e也再一次表明,车辆在没有横摆力矩的控制下,其质心侧偏角和横摆角速度都难以通过方向盘转角进行控制,最终导致车辆不能很好的沿着期望的测试道路运行。因此单独的差动助力转向控制和横摆力矩控制都有一定的局限性,仿真结果表明本文建立的联合控制系统能很好的兼顾两者的优点。2606结论(1)差动助力转向控制系统省略的传统助力转向系统必须的额外助力提供装置,能有效的改善车辆的转向轻便性,且便于和底盘稳定性控制系统相集成。(2)单独的差动助力转向控制和横摆力矩控制都具有一定的局限性,前者不能保证车辆的稳定运行,从而难以真正的降低驾驶员的操纵强度;后者则会对转向系统产生不必要的265力矩冲击,严重降低了驾驶员的驾乘舒适性。仿真结果表明:两者的联合控制系统能保证车辆行驶稳定性的同时降低驾驶员的操纵负担、提高驾乘舒适性,有效的改善了车辆的操纵性能。270[参考文献](References)[1]MurataS.Innovationbyin-wheel-motordriveunit[J].VehicleSystemDynamics,2012,50(6):807-830.[2]赵林峰,陈无畏,秦明辉,等.基于转向轻便性及回正性能设计的EPS应用[J].机械工程学报,2009,45(6):181-187.[3]余卓平,冯源,熊璐.分布式驱动电动汽车动力学控制发展现状综述[J].机械工程学报,2013,27549(8):105-114.[4]LengB,XiongL,JinC,etal.DifferentialDriveAssistedSteeringControlforanIn-wheelMotorElectricVehicle[J].SAEInternationalJournalofPassengerCars-ElectronicandElectricalSystems,2015,8(2).[5]WangJ,WangQ,JinL,etal.Independentwheeltorquecontrolof4WDelectricvehiclefordifferentialdriveassistedsteering[J].Mechatronics,2011,21(1):63-76.280[6]杨鹏飞,熊璐,张康,等.分布式电驱动汽车稳定性控制策略设计与试验[J].机械工程学报,2013,49(24):128-134.[7]ZhouH,ChenH,RenB,etal.Yawstabilitycontrolforin-wheel-motoredelectricvehiclewithafuzzyPIDmethod[C]//ControlandDecisionConference.IEEE,2015:1876-1881.[8]申荣卫,林逸,台晓虹,等.电动助力转向系统建模与补偿控制策略[J].农业机械学报,2007,38(7):5-9.285[9]施国标,申荣卫,林逸.电动助力转向系统的建模与仿真技术[J].吉林大学学报(工),2007,37(1):31-36.[10]DibaF,EsmailzadehE.Integratedmomentumwheelanddifferentialbrakingcontroltoimprovevehicledynamicperformance[J].ProceedingsoftheInstitutionofMechanicalEngineersPartIJournalofSystems&ControlEngineering,2013,227(7):563-576.[11]SongC,LiS,SongS,etal.StudyofdirectyawmomentcontrolforIEVtoimprovehandlingandstability290control[C]//SixthInternationalConferenceonIntelligentControlandInformationProcessing.IEEE,2015:230-236.[12]TahamiF,KazemiR,FarhanghiS.Anoveldriverassiststabilitysystemforall-wheel-driveelectricvehicles[J].IEEETransactionsonVehicularTechnology,2003,52(3):683-692.[13]GB/T6323.1-1994,汽车操纵稳定性试验方法蛇形试验.295-11-'
您可能关注的文档
- 离子交换树脂法分离纯化赖氨酸的研究.pdf
- 科技成果转化下农业专业技术人员对继续教育的认知态度、参与行为及其需求意愿分析--基于福建、安徽、山东和黑龙江四省的问卷调查.pdf
- 空冷支架结构体系抗震性能试验研究.pdf
- 竞争环境下考虑消费者行为的预售策略研究.pdf
- 纯扭作用下型钢混凝土构件极限承载力计算.pdf
- 绿色创新与企业财务绩效:资源松弛与环境动荡性的调节作用.pdf
- 绿色创新的驱动力一个文献综述.pdf
- 考虑异质车辆的生产与运输计划整合研究.pdf
- 身体攻击、关系攻击的共同性与差异性:意志控制与性别的作用.pdf
- 近五年教育舆情变化态势探析(2010-2014)--以《中国教育报》和新浪微微博为例.pdf
- 钢悬链线触地区管土作用模型实验研究.pdf
- 钢管混凝土空间KK相贯节点力学性能研究.pdf
- 销售人员人力资本投资对企业出口绩效的影响研究.pdf
- 长沙磁浮项目应用PPP模式的成效分析.pdf
- 面向分行轨迹的薄壁件铣削颤振控制方法.pdf
- 面向创新创业型人才培养的《电力电子变流技术》课程改革与研究.pdf
- 饱和粘土静力及循环稳定弹塑性分析.pdf
- 2017年交警先进事迹材料五篇.doc
相关文档
- 施工规范CECS140-2002给水排水工程埋地管芯缠丝预应力混凝土管和预应力钢筒混凝土管管道结构设计规程
- 施工规范CECS141-2002给水排水工程埋地钢管管道结构设计规程
- 施工规范CECS142-2002给水排水工程埋地铸铁管管道结构设计规程
- 施工规范CECS143-2002给水排水工程埋地预制混凝土圆形管管道结构设计规程
- 施工规范CECS145-2002给水排水工程埋地矩形管管道结构设计规程
- 施工规范CECS190-2005给水排水工程埋地玻璃纤维增强塑料夹砂管管道结构设计规程
- cecs 140:2002 给水排水工程埋地管芯缠丝预应力混凝土管和预应力钢筒混凝土管管道结构设计规程(含条文说明)
- cecs 141:2002 给水排水工程埋地钢管管道结构设计规程 条文说明
- cecs 140:2002 给水排水工程埋地管芯缠丝预应力混凝土管和预应力钢筒混凝土管管道结构设计规程 条文说明
- cecs 142:2002 给水排水工程埋地铸铁管管道结构设计规程 条文说明