

- 393.26 KB
- 2022-04-22 13:32:30 发布
- 1、本文档共5页,可阅读全部内容。
- 2、本文档内容版权归属内容提供方,所产生的收益全部归内容提供方所有。如果您对本文有版权争议,可选择认领,认领后既往收益都归您。
- 3、本文档由用户上传,本站不保证质量和数量令人满意,可能有诸多瑕疵,付费之前,请仔细先通过免费阅读内容等途径辨别内容交易风险。如存在严重挂羊头卖狗肉之情形,可联系本站下载客服投诉处理。
- 文档侵权举报电话:19940600175。
'中国科技论文在线http://www.paper.edu.cn基于线反电动势估算的无刷直流电机无传感器控制策略**赵白鸽,佟诚德5(哈尔滨工业大学电气工程及其自动化学院,哈尔滨,150006)摘要:根据无刷直流电机理想换相点与线反电动势过零点同相位的关系,提出了基于线反电动势估算的无位置传感器控制策略。化简了线反电动势的计算公式,给出转子处于不同位置的换相条件。分析了非导通相续流产生的线反电动势估算误差,并给出了解决方案。对低通滤波器造成的转子位置检测误差进行研究,针对电机转速的变化提出了“60°-α”和“120°-α”的10补偿策略,拓宽了调速范围。仿真和实验结果显示该策略能够有效的补偿转子位置检测的误差,给出准确的换相信号,电机在高速和低速运行性能良好。关键词:电气工程;无刷直流电机;线反电动势估算;无传感器控制;相位补偿中图分类号:TM383.415NovelSensorlessControlStrategyforBLDCMBasedontheEstimationofLineBackEMFZhaoBaige,TongChengde(ElectricalEngineering&AutomationSchool,HarbininstituteoftechnologyUniversity,Harbin,150006)20Abstract:Inthispaper,anovelsensorlesscontrolstrategybasedontheestimationoflinebackelectromotiveforce(back-EMF)isproposed,accordingtotherelationshipbetweentheidealcommutationpointsofthebrushlessDCmotor(BLDCM)andthezero-crossingpointsoflineback-EMF.Thecalculationformulaoflineback-EMFissimplifiedproperlyandthecommutationrulesfordifferentpositionsoftherotorispresented.Theestimationerroroflineback-EMFcausedbythefreewheelcurrent25ofsilentphaseisanalyzedandthesolutionisgiven.Thephaseddelayofthelow-passfilterisconsidered,andanewcompensationmethodfor“60°-α”&“120°-α”isstudiedinthispapertoeliminationtheerror.Finally,thesimulationandexpermentalresultsshowthattherotor-position-detectionerrorisavoidedeffectivelyandthemotordrivenbytheaccuratecommutationsignalcanworkwellinlowspeedandhighspeed.30Keywords:electricalengineering;brushlessDCmotor(BLDCM);lineback-EMFestimation;sensorlesscontrol;phasedelay0引言无刷直流电机系统由电机本体,电子换相电路和位置传感器组成。一般要采用电磁式、35霍尔式或光电式等位置传感器来获得准确的转子磁极位置信号。然而上述传感器的使用会给系统带来一些缺点和局限,如增加电机体积、重量和成本,对安装精度要求高,应用环境受限等。由此,无传感器控制应运而生,是目前无刷直流电机控制的研究热点之一。发展至今,多数的永磁无刷直流电机无传感器控制是基于对反电动势过零点检测。端电压检测法是目前最常用也是最成熟的无刷直流电机无传感器控制方法,该方法基于电机反电作者简介:赵白鸽(1992-),女,电机驱动与控制通信联系人:佟诚德(1983-),男,副教授、硕导,电动汽车用电机及其驱动控制系统.E-mail:tongchengde@hit.edu.cn-1-
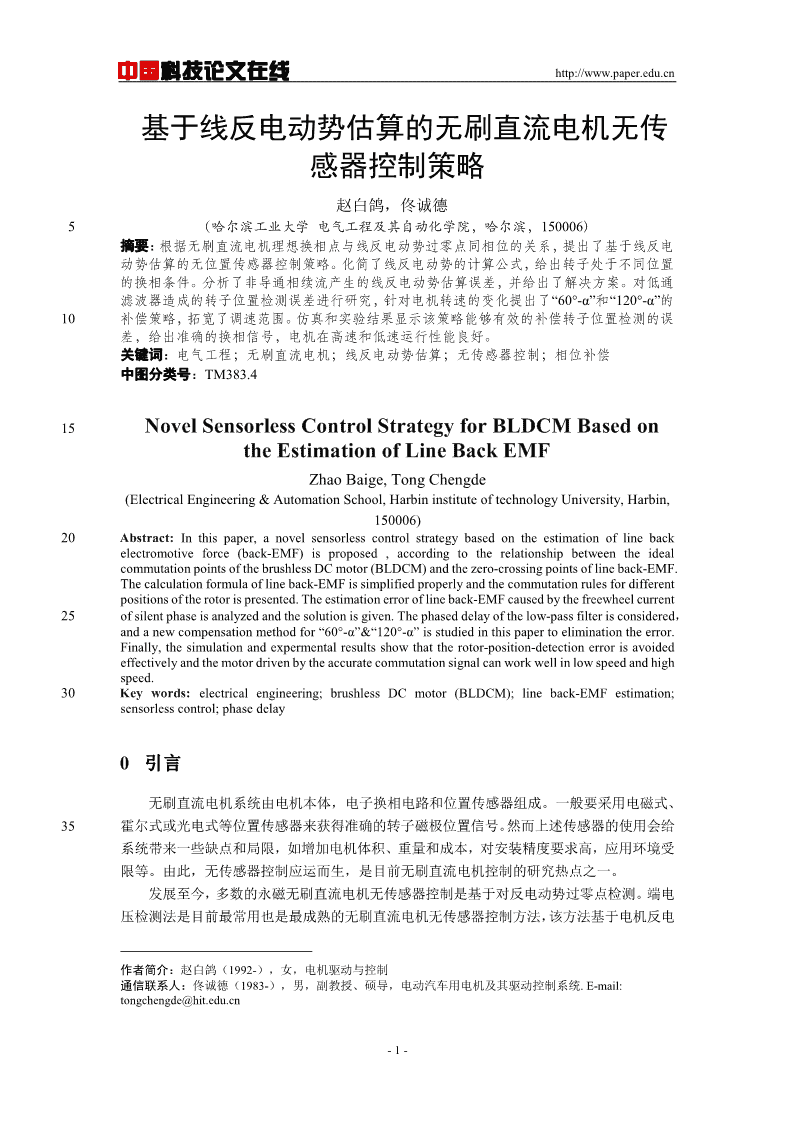
中国科技论文在线http://www.paper.edu.cn40动势过零点与换相点相差30°电角度这一原理,通过检测电机端电压间接得到反电动势的过[1]零点,再经过相位延迟得到定子电流的理想换相点。该方法低速性能差,高速重载时关断[2]相二极管续流会导致电机端电压畸变,使得反电动势过零点被淹没。不同于传统的“反电势法”,“线反电势法”利用了电机理想换相点与线反电动势过零点同相位的关系,该方法对转子位置检测准确度更高,硬件电路更加简单,调速范围更宽。本文45对线反电动势的估算公式进行化简,重点分析了转子位置检测存在的误差以及补偿方法,对低速和高速运行分别提出了不同的相位补偿策略,仿真和实验结果验证了控制策略的可行性。1基于线反电动势估算的转子位置检测原理无刷直流电机的线反电动势与相电流在一个电周期内的波形如图1所示。对于方波型无刷直流电机,理想线反电动势波形为60°梯形波,从图1中可以看出eac,eba,ecb的六个过50零点分别对应着一个电周期内的三相定子电流的6个换相点。因此通过检测到线反电动势的过零点,即可得到理想的换相信号。eaciaθebaibθecbicθ图1线反电动势和相电流波形根据无刷直流电机的三相电压方程,可推导出线反电动势的数学表达式为:deuR=−−−−()iiLMii()()−acacacacdt55d(1)euR=−−−−()iiLMii()()−babababadtdeuR=−−−−()iiLMii()()−cbcbcbcbdt式中eac,eba,ecb——线反电动势;uac,uba,ucb——线电压;ia,ib,ic——相电流;R,L,M——相绕组电阻、自感、互感。60由上式可以看出,线反电动势只与线电压,相电流和电机参数有关,而电机定子电感随转子位置变化且难以精确检测,因此需对公式进行化简。以A、C相线反电动势eac为例,相电流在非换相期间变化平稳,只在换相后瞬间产生电压尖峰且该尖峰幅值与换相后线反电[3]动势正负极性一致,不影响过零点的判断,因此忽略电流微分项。换相前一时刻,即eac过零点前,未导通相A相电流为零,而在其余时刻,该电流在电阻上的压降不影响线反电65动势极性的变化,因此将该相电流忽略。eba、ecb的化简方式同上,最终得到化简后的计算公式为:-2-
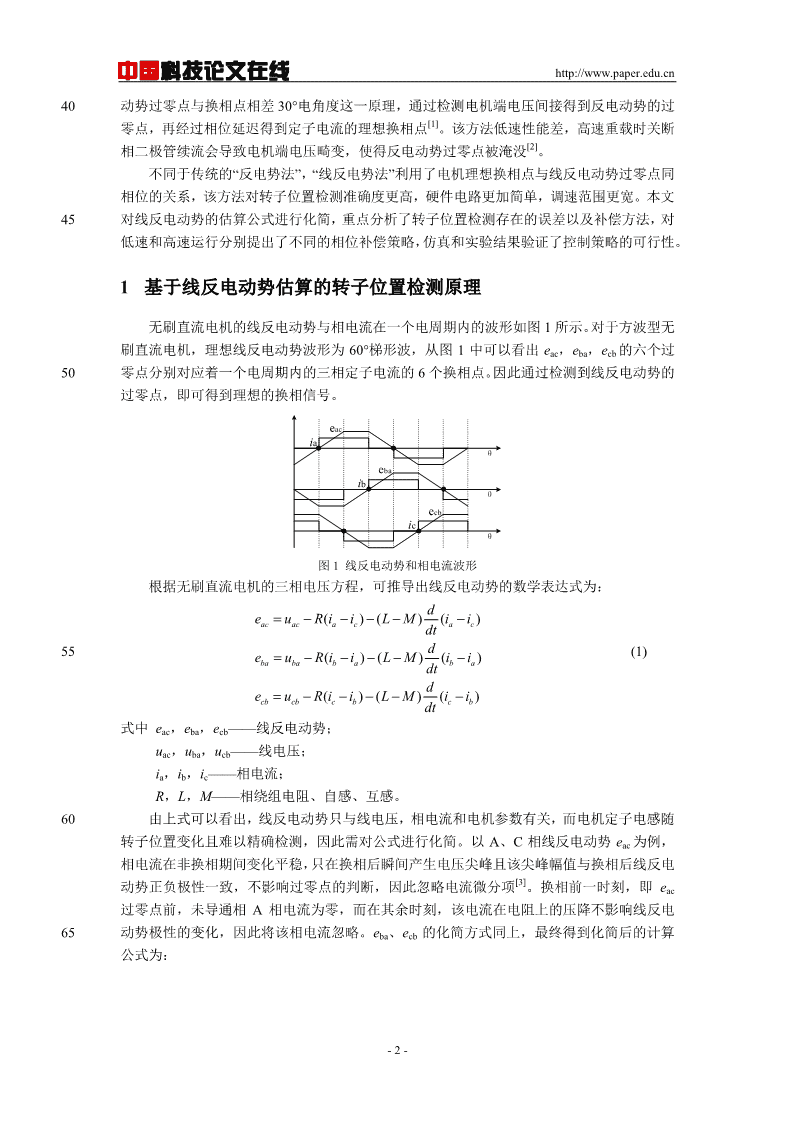
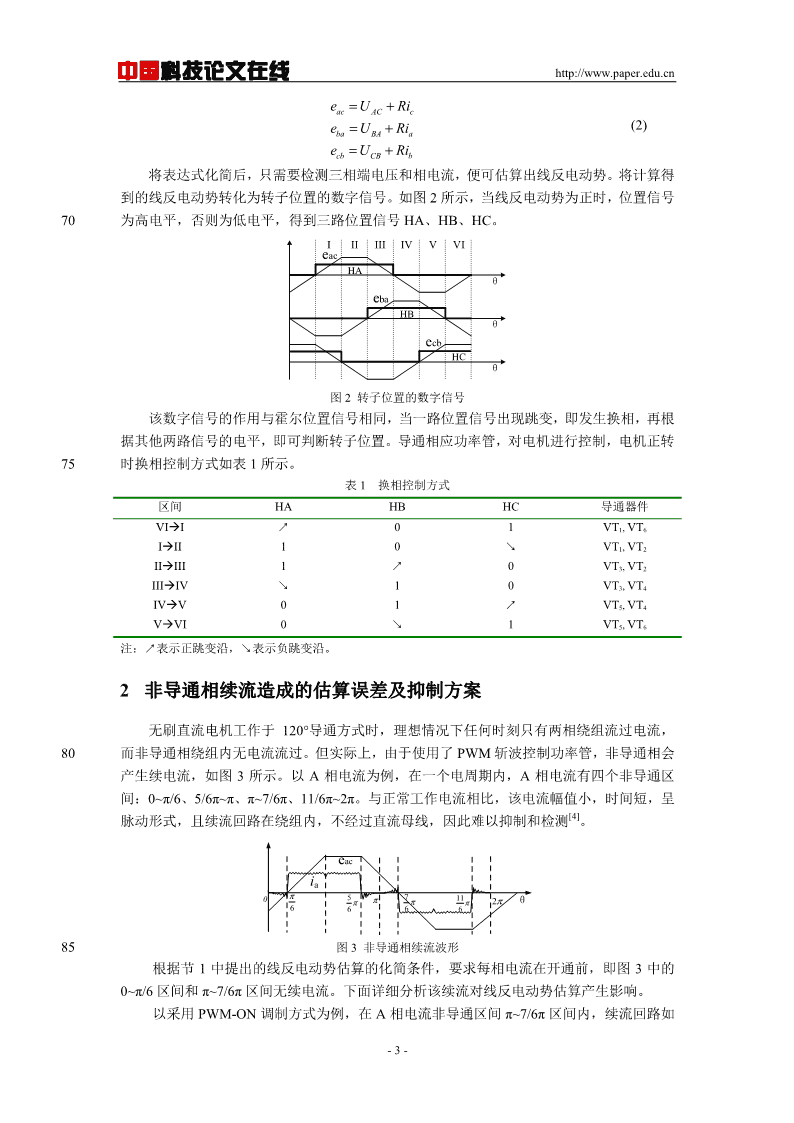
中国科技论文在线http://www.paper.edu.cneUR=+iacACceUR=+i(2)baBAaeUR=+icbCBb将表达式化简后,只需要检测三相端电压和相电流,便可估算出线反电动势。将计算得到的线反电动势转化为转子位置的数字信号。如图2所示,当线反电动势为正时,位置信号70为高电平,否则为低电平,得到三路位置信号HA、HB、HC。IIIIIIIVVVIeacHAθebaHBθecbHCθ图2转子位置的数字信号该数字信号的作用与霍尔位置信号相同,当一路位置信号出现跳变,即发生换相,再根据其他两路信号的电平,即可判断转子位置。导通相应功率管,对电机进行控制,电机正转75时换相控制方式如表1所示。表1换相控制方式区间HAHBHC导通器件VII↗01VT1,VT6III10↘VT1,VT2IIIII1↗0VT3,VT2IIIIV↘10VT3,VT4IVV01↗VT5,VT4VVI0↘1VT5,VT6注:↗表示正跳变沿,↘表示负跳变沿。2非导通相续流造成的估算误差及抑制方案无刷直流电机工作于120°导通方式时,理想情况下任何时刻只有两相绕组流过电流,80而非导通相绕组内无电流流过。但实际上,由于使用了PWM斩波控制功率管,非导通相会产生续电流,如图3所示。以A相电流为例,在一个电周期内,A相电流有四个非导通区间:0~π/6、5/6π~π、π~7/6π、11/6π~2π。与正常工作电流相比,该电流幅值小,时间短,呈[4]脉动形式,且续流回路在绕组内,不经过直流母线,因此难以抑制和检测。eacia0π5711θππππ2π666685图3非导通相续流波形根据节1中提出的线反电动势估算的化简条件,要求每相电流在开通前,即图3中的0~π/6区间和π~7/6π区间无续电流。下面详细分析该续流对线反电动势估算产生影响。以采用PWM-ON调制方式为例,在A相电流非导通区间π~7/6π区间内,续流回路如-3-
中国科技论文在线http://www.paper.edu.cn图4中虚线所示,A相通过下桥臂二极管D2续流,端点A与电源地相连,则UA=0。S1S3S5D1D3D5eaAiaebBecCS4S6S2D2D4D690图4π~7/6π区间A相续流回路当B相上桥臂功率管S3关断时(PWM_OFF),三相端电压均为零,݁=−݁=ܧ、݁<[5]0。根据三相电压方程可推出,此时中点电压ܷே=0,则非导通相A相的等效电阻、电感上电压Uaxf可表示为:95UUUe=−=−(3)axfAxAௗಲUaxf>0,由ܴ݅+ܮ=ܷ௫,可解出续电流表达式为:ௗ௧RRU−−tteaxfLLAic=+=ee−−(1)(4)Aoff1RR当B相上桥臂功率管S3导通时(PWM_ON)时,同理可得A相等效电阻、电感上电压为:1100UU=−()+eaxn2da(5)解得续电流表达式为:RRUU−−tt+2eaxnLLdAic=+=e−(1−e)AonR12R(6)可以看出,由于斩波的作用,非导通相续流成脉动形式。在PWM_OFF期间,续电流逐渐增加,且当工作点越靠近7/6π时,续电流幅值越大;PWM_ON期间,续电流逐渐减小。105同理可推导0~π/6区间非导通相续电流在PWM(OFF)和PWM(ON)期间的表达式,与π~7/6π区间的表达式一致,变化规律相同。根据上述分析,可推导出非导通相续电流幅值的表达式为:RKω−ToffeLIe=−(1−)zmaxR(7)其中Ke——电机电势常数;110Toff——斩波的关断时间。从上式可以看出影响非导通相续电流大小的因素主要有:电机转速,载波频率。对于无刷直流电机,反电动势与转速成正比,当转速增加时,未导通相绕组上的电压增大,使得产生的脉动电流增大;而载波频率越小,单位脉动时间越长,产生的续电流幅值越大。因此为了减小非导通相续电流的幅值,应在功率器件允许的范围内,尽量提高开关频率。115当0~π/6区间和π~7/6π区间内存在续电流时,在理想换相点,估算得到的线反电动势将存在误差,在理想换相点π/6和7/6π处,估算误差分别为-RIzmax和RIzmax,此误差会导致线反电动势过零点滞后于理想换相位置,且随转速增加,滞后的角度增大。目前常用的脉宽调制方法中,采用H-PWM-L-PWM、ON-PWM和PWM-ON-PWM控[6]制时,在0~π/6区间和π~7/6π区间内无续电流产生。从降低功率管损耗和转矩脉动的角度[7]120考虑,选择PWM-ON-PWM的调制方式。-4-
中国科技论文在线http://www.paper.edu.cn3滤波电路造成的位置检测误差及补偿策略为了有效滤除PWM斩波的高频干扰,需对电压和电流的采样值进行低通滤波,滤波电路如图5所示:+R1ui+uoR2C——125图5低通滤波电路由R1、R2、C组成的一阶低通滤波器的幅频特性为:R|()|Aω=2(8)22()RR++()RRCω1212移相角度为:RRCω12(9)α=arctan()R+R12130从上式可以看出,随转速的增加,移相角度逐渐增大,变化范围为0~90°。下面提出“60°-α”和“120°-α”的补偿方法,可以有效的消除低通滤波器带来的相位延迟。当转速较低时,滤波器产生的移相角度小于60°,理想线反电动势波形和滤波后波形如图6所示。图中eac,eba,ecb为理想线反电动势波形,eac’,eba’,ecb’为线反电动势的滤波波形,α为移相角度,γ为补偿角度。以理想换相点Z(线反电动势ecb的过零点)为例,经滤135波后,该点被延迟至点P,补偿γ=60°-α电角度,使点P移至理想换相点C处。对于一些中低速的无刷直流电机,“60°-α”的补偿方式就可以满足相位补偿的需求,但对于高速电机,具有较低的截止频率的低通滤波器会导致移相角度α超过60°,此时就需要切换至“120°-α”的补偿模式,补偿策略如图7所示。理想换相点Z经滤波后,延迟至下一个理想换相点C之后的P处,补偿角度γ=120°-α使其移至理想换相点N60°120°线反电动势的理想过零点线反电动势的理想过零点线反电动势的实际过零点αγ线反电动势的实际过零点αγeacebaecbeacebaecbeac’eba’ecb’ecb’eac’eba’ZPCNZPCN0π/32/3ππ4/3π5/3π2π7/3π0π/32/3ππ4/3π5/3π2π7/3π140图6“60°-α”补偿策略原理图7120°-α补偿策略原理通过两种补偿方式后,滤波电路造成的换相信号相位延迟得到了有效的补偿,三相线反电动势的过零点与理想换相点同相位,从而实现最佳换相。-5-
中国科技论文在线http://www.paper.edu.cn4仿真结果分析145结合上述补偿方式,控制系统框图如图8所示。系统采用双闭环控制,外环为速度环,反馈的实际转速与给定转速做差,经PI调节得到期望的参考电流,再与反馈的母线电流做差,经PI调节,得到PWM的占空比。检测无刷直流电机的相电压和相电流,估算出线反电动势,将其转换为转子位置的数字信号。根据转速选择相应的补偿方式,结合转子位置信号得到三相半桥逆变器的控制信号,驱动电机运行。电流采样i*_n+速度i*+电流PWM换相逻三相BLDCM_控制器控制器发生器辑控制逆变器n60°-α120°-α线相相位延迟补偿方式补偿方式电电压流角度计算转子位线反电动势速度计算置信号估算150图8控制系统框图为验证本文提出的基于线反电动势估算的无刷直流电机无传感器控制策略的有效性,在Matlab的Simulink环境下建立了控制系统仿真模型。整个仿真模型主要由无刷直流电机、电压逆变器、低通滤波器、线反电动势计算模块、相位补偿模块、PWM-ON-PWM发生模155块组成。仿真电机参数为:极对数p=8;相电阻R=4.765Ω;定子自感Ls=8.5mH;转动惯量2J=0.008kgm;反电动势系数Ke=0.04V/(rad/s);额定电压UN=300V;额定转矩TN=1.5Nm;额定转速nN=1500r/min。控制系统调速范围100~3000r/min(对应频率66.67~400Hz),PWM斩波频率16kHz,160滤波器输出范围0~3V,据此设计一阶低通滤波器参数:R1=5.6MΩ,R2=27kΩ,C=47nF,截止频率788Hz。经计算,该仿真系统的相位补偿切换速度为1638r/min,为验证相位补偿控制策略,分别在电机转速为1000r/min和3000r/min时进行仿真实验,仿真结果如图9和图10所示。从图9(a)中可以看出,当转速为1000r/min时,系统选用“60-α”的补偿策略,其中估算165波形的过零点与理想换相点存在一定误差,补偿后线反电动势过零点与理想换相点重合,可实现最佳换相。图7(b)和(c)给出了该速度下的转速和转矩变化曲线,可以看出速度响应快,控制系统稳定,控制策略可行。100αγ)V理想波形500补偿波形-50估算波形线反电动势(-1000.210.220.230.24时间(s)(a)线反电动势估算和补偿的仿真波形-6-
中国科技论文在线http://www.paper.edu.cn120012))8008rpmNm4004速度(转矩(0000.20.40.60.8100.20.40.60.81170时间(s)时间(s)(b)转速(c)电磁转矩图9n=1000r/min的仿真波形如图10(a)所示,当转速为3000r/min时,低通滤波器产生的移相角度大于60°,系统切换至“120-α”的补偿策略,补偿后线反电动势过零点与理想换相点重合。从速度和转矩曲线175可以看出控制策略的有效性。200αγ)V理想波形1000补偿波形-100线反电动势(估算波形-2000.210.2150.22时间(s)(a)线反电动势估算和补偿的仿真波形123000))8rpm2000Nm41000速度(转矩(0000.20.40.60.8100.20.40.60.81时间(s)时间(s)(b)转速(c)电磁转矩180图10n=3000r/min的仿真波形5实验结果分析为进一步验证控制策略的可行性,搭建了实验平台。实验平台主要包括一台1.5kW的表贴式无刷直流电机,TMS320F28335为主芯片的无刷直流电机控制器,和一台Magtrol测功机。电机参数为:Ls=8.46mH,R=0.35Ω,ψm=0.14Wb,极对数p=2。母线电压给定Udc=30V。185实验中利用霍尔位置传感器的三路霍尔信号得到转子的实际位置,与无传感器控制算法得到的换相位置进行对比,从而验证本控制策略的换相精度。图11和图12分别为给定转速为300r/min和1500r/min下,估算的线反电动势波形和补偿后的换相信号波形。其中图11(a)和图12(a)为滤波后的估算线反电动势Eac和霍尔信号HA的波形。可以看出滤波电路造成的相位延迟角度有随转速增加而增大。图11(b)和图12(b)则分别给出相位补偿后,换相触发信190号和三路霍尔信号的波形,可以看出采用本文提出的控制策略得到的换相触发信号与转子实际位置相符合,换相精度高,可实现最佳换相。-7-
中国科技论文在线http://www.paper.edu.cn8线反电动势换相脉换霍尔信号A霍尔信号B霍尔信号4C霍尔信号位置信号&0)V&(-4-8线反电动势转子位置信号换相信号0.000.050.100.150.000.050.100.15时间(s)时间(s)(a)线反电动势估算波形(b)转子位置和换相触发信号图11转速n=300r/min的实验波形30线反电动势换相脉换20霍尔信号霍尔信号A霍尔信号B霍尔信号C10&)V&(0-10-20线反电动势位置信号-30转子位置信号换相信号01020300102030195时间(ms)时间(ms)(a)线反电动势估算波形(b)转子位置和换相触发信号图12转速n=1500r/min的实验波形6结论本文提出的基于线反电动势估算的无刷直流电机无传感器控制策略,对非导通相续流和200低通滤波器带来的转子位置检测误差进行详细分析,并给出了相应的补偿抑制方案。与传统的“反电势法”相比,该方法所需硬件电路简单,换相信号的检测不受关断相续流的影响,调速范围宽,换相精度高。仿真和实验结果显示本策略能准确的给出定子电流的换相信号,为无刷直流电机的无传感器控制提供了新的思路,在高速、高精度的应用场合具有实际意义。205[参考文献](References)[1]K.Iizuka,H.Uzuhashi,M.Kano,T.Endo,andK.Mohri.Microcomputercontrolforsensorlessbrushlessmotor[J].IEEEtrans,1985:595-601.[2]杨明,刘杰,徐殿国.重载条件下无刷直流电机无位置传感器驱动换相续流影响的分析及其补偿[J].中国电机工程学报,2013,30(33):107.210[3]李志强,夏长亮,陈炜.基于线反电动势的无刷直流电机无位置传感器控制[J].电工技术学报,2010,25(7):40.[4]韦鲲.永磁无刷直流电机电磁转矩脉动抑制技术的研究[D].浙江:浙江大学,2005:32-35[5]李和明.无刷直流电机无位置传感器控制的研究[D].浙江:浙江大学,2007:38.[6]韦鲲.一种新的消除无刷直流电机非导通相续流的PWM调制方式[J].中国电机工程学报,2005,25(7):215106.[7]吴善强,金超,程楠等.基于DSP的无刷直流电机新型转矩脉动抑制策略[J].计算机测量与控制,2016,24(7):114-115-8-'
您可能关注的文档
- Tim-3Galectin-9途径在肝脏区域免疫调节中的作用.pdf
- 一种低成本雷电定位预警系统的研究.pdf
- 作为Rho激酶抑制剂的六氢氮杂卓氧基苯甲酰胺类化合物的合成.pdf
- 偶氮苯基镁自由基化合物的反应性研究.pdf
- 利用直接重编程诱导心肌细胞体外培育心肌组织.pdf
- 双金属xNiyCo催化剂在二氧化碳重整甲烷反应中的催化性能:制备方法及载体孔结构的影响.pdf
- 叶酸偶联的荧光聚合物纳米探针的制备及细胞成像.pdf
- 基于图的流形排序的多层级融合显著性目标检测.pdf
- 基于季节调整的CPI与PPI传导关系研究.pdf
- 提升超导磁浮密封输运系统悬浮间距的方法.pdf
- 敲降KLF4表达增强肝癌细胞Bel-7402对奥沙利铂的敏感性.pdf
- 机械专业英语教学改革背景分析及对策.pdf
- 漆黄素调节PI3KAktmTOR通路诱导乳腺癌细胞凋亡.pdf
- 考虑随机风速的直驱型风力发电机机电暂态建模.pdf
- 航发叶片砂带磨削单元系统集成关键技术研究及应用调试.pdf
- 螺杆弯齿式花生摘果滚筒设计与仿真.pdf
- 3D打印行业发展情况及相关上市公司分析报告
- 2003年年度通信产品行业分析报告
相关文档
- 施工规范CECS140-2002给水排水工程埋地管芯缠丝预应力混凝土管和预应力钢筒混凝土管管道结构设计规程
- 施工规范CECS141-2002给水排水工程埋地钢管管道结构设计规程
- 施工规范CECS142-2002给水排水工程埋地铸铁管管道结构设计规程
- 施工规范CECS143-2002给水排水工程埋地预制混凝土圆形管管道结构设计规程
- 施工规范CECS145-2002给水排水工程埋地矩形管管道结构设计规程
- 施工规范CECS190-2005给水排水工程埋地玻璃纤维增强塑料夹砂管管道结构设计规程
- cecs 140:2002 给水排水工程埋地管芯缠丝预应力混凝土管和预应力钢筒混凝土管管道结构设计规程(含条文说明)
- cecs 141:2002 给水排水工程埋地钢管管道结构设计规程 条文说明
- cecs 140:2002 给水排水工程埋地管芯缠丝预应力混凝土管和预应力钢筒混凝土管管道结构设计规程 条文说明
- cecs 142:2002 给水排水工程埋地铸铁管管道结构设计规程 条文说明