

- 290.47 KB
- 2022-04-22 13:43:46 发布
- 1、本文档共5页,可阅读全部内容。
- 2、本文档内容版权归属内容提供方,所产生的收益全部归内容提供方所有。如果您对本文有版权争议,可选择认领,认领后既往收益都归您。
- 3、本文档由用户上传,本站不保证质量和数量令人满意,可能有诸多瑕疵,付费之前,请仔细先通过免费阅读内容等途径辨别内容交易风险。如存在严重挂羊头卖狗肉之情形,可联系本站下载客服投诉处理。
- 文档侵权举报电话:19940600175。
'中国科技论文在线http://www.paper.edu.cnMotionPlanningofoneBionicUnderactuatedHopping#RobotduringStance**5MENGXiangyan,GEWenjie(SchoolofMechanicalEngineering,NorthwesternPolytechnicalUniversity,Xi"an,710072)Abstract:Thepaperdealswiththeproblemofmotionplanningofanunderactuatedhoppingrobotinjointspace.Firstly,thepaperestablishsthemodeloftheunderactuatedrobot.Then,combiningthecouplingequationsabouttheactuatedandunderactuatedjointsandtheequationtheCOM,the10accelerationequationsbetweentheactuatedjointsandtheCOMarederived.UsingtheverticalaccelerationequationsoftheCOMastheconstraints,theproperjointtrajectoriesduringstancearegeneratedbynumericaliterationandoptimization.Thesimulationresultsshowthattheproposedmethodinthispaperisfeasibleandcanbeextendedtootherunderactuatedhoppingrobots.Keywords:hoppingrobot;underactuatedrobots;motionplanning;stance;optimization150IntroductionKangaroohastheabilitiesofhigh-speedmotion,smallfootholdrequirementandlowenergy[1,2]cost,whichmakethemextremelyefficienthoppers.Inspiredbytheseadvantages,theresearchofbionichoppingrobotshaveattractedresearcher’sinterest.Inordertoavoidobstaclesandadapt20totheirregularterrain,researchersshouldplanthemotionofthehoppingrobot.Motionplanningofthehoppingrobotisachallengingproblem,becausethehoppingrobotisacomplicateddynamicsystem,whichisanonlinear,multivariable,strongcouplingsystem.Thereareaboutfourkindofmethodforthemotionplanningoftherobot.Theseare:1)[3,4]motionplanningmethodbasedonthecenterofmass(COM).Kajitaetal.planedthetrajectory25ofCOMaccordingtotherobot"smomentumandangularmomentuminordertorealizethe[5][6]runningorjumpingmotion;2)methodbasedontheinvertedpendulummodel.AhmadiandBuehlerstudiedthegaitoptimizationproblemwiththeminimumenergyconsumptionforthe[7]passiverunningrobotbasedonspringloadedinvertedpendulummodel;3)methodbasedonthe[8]optimalcontrol.Fujimotoproposedoptimalcontroltosolvetheminimumenergyconsumption[9][10]30trajectories;4)methodbasedonthestabilityconditionssuchaszeromomentumpoint(ZMP).[11]Nagasakietal.planrunninggaitaccordingtoreferenceZMPtrajectories.Duetotheexistenceoftheun-actuatedjointbetweenthefootandtheground,thehoppingrobotissubjectedtosecond-ordernonholonomicconstraints.Itisanunderactuatedsystem.Underactuatedsystemwhichthenumberofactuatorislessthanthedegreeoffreedomhave[12,13]35becomeresearchfocusinrecentyears.Ithassmallvolume,lightquality,highflexibilityandlowenergyconsumption.Nowmostresearchersstudyunderactuatedrobotssuchasthespacerobots,underwaterrobots,mobilerobots,walkingrobotsandunderactuatedmanipulators.Thereisalittleresearchontheunderactuatedhoppingrobot.[14]Fortheobjectiveofcontrol,weneedtoacquireofthetrajectoriesofthejoints.Themotion40planningoftherobotinjointspaceisaninversekinematicproblemwhichhasmultiplesolutions.Meanwhile,thecharacteristicoftheunderactuatedrobotisdifferentfromthefull-actuatedrobot.TheJabobianmatrixwhichisamappingfromtheCartesianspacetothejointspacedoesnotonlydependonthelocomotiveparametersofthesystem,butalsorelatetothedynamicalcouplingequation,sothemotionplanninginjointspaceisverydifficult.ThereisstillnoeffectivemethodFoundations:SpecializedResearchFundfortheDoctoralProgramofHigherEducationofChina(No.20136102130001);NationalNaturalScienceFoundationofChina(No.50975230)Briefauthorintroduction:MENGXiangyan(1985-),female,bionicrobotsCorrespondanceauthor:WenjieGe(1957-),male,Professor,bionicrobots,.E-mail:gwj@nwpu.edu.cn-1-
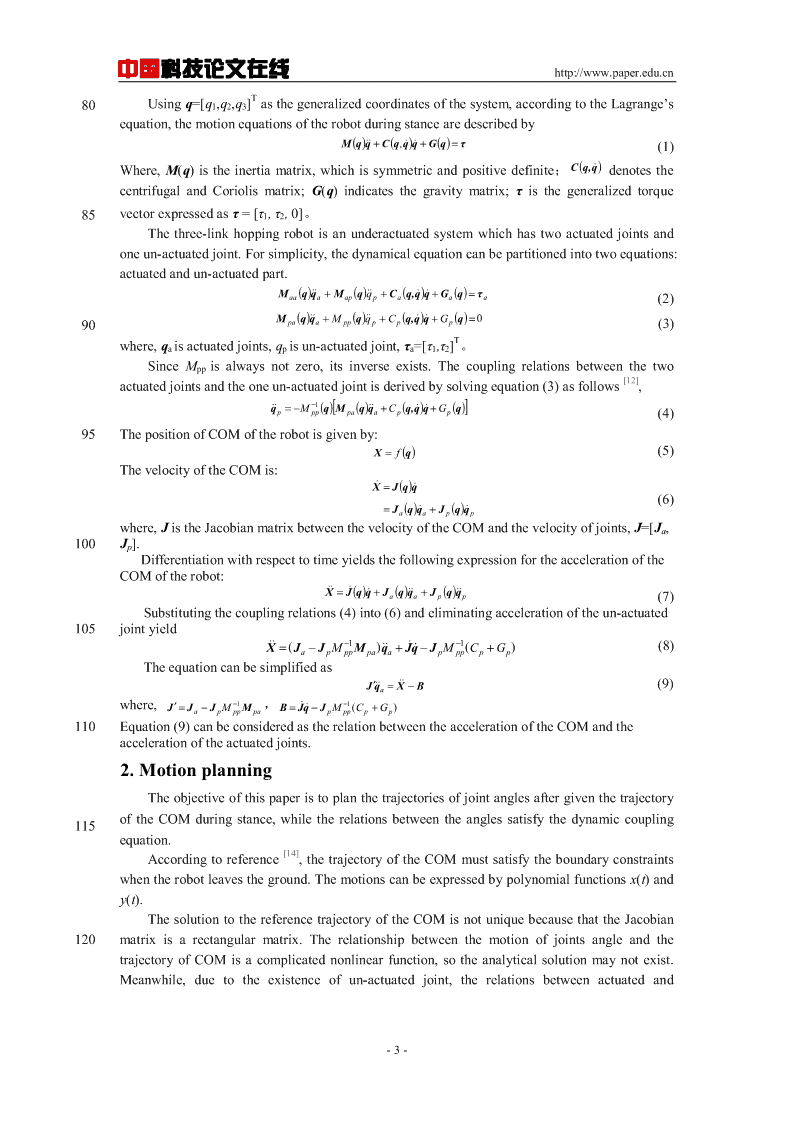
中国科技论文在线http://www.paper.edu.cn45forthetrajectoryplanningofunderactuatedrobot.BergermanandYangshengobtainedasequenceoftrajectoriesthatconnectthestartandthe[15]goalconfigurationsbyswitchingthejointbrakesonandoff.Lynchstudiedthecollision-freemotionplanningfromonezerovelocitystatetoanotherforathree-jointrobotinahorizontal[16]plane.LucaandOriolosolvedthemotionplanningproblemof3-linkplanarunderactuated[17]50manipulatorwithapassivethirdjointbydynamicfeedbacklinearization.Yoshikawaproposedadesirabletrajectorythatstartsfromanygiveninitialpoint,convergestoanygivendesiredfinalpoint,andonthewaypassesthroughanygivendesiredpassingpointthatcanbespecifiedrather[18]freely.HeGuangpingetal.investigatedthecollision-freepathplanningoftheunderactuated[19]redundantmanipulator.However,theaboveresearchallconcernedunderactuatedmanipulator55withapassivethirdjoint,theyarenotfitfortherobotwithafirstpassivejoint.T.Y.Wuetal.consideredthetrajectoryplanningofhoppingrobotwithun-actuatedphase,expressedthemotionofactuatedjointswithasmoothBézierpolynomialandfinallyobtainedthetrajectoriesbasedontheoptimizationofminimalactuationenergy,butfortheassuranceofstabilitythereneedalotofconstraints,sotheoptimizationprocedureiscomplex,andthe[20]60convergenceishardtoachieve.Thepaperstudiesthemotionplanningproblemof3-linkunderactuatedhoppingrobot.Firstweestablishthedynamicmodeloftheunderactuatedhoppingrobotduringstance,thenderivestherelationshipbetweentheCOMandtheactuatedjointsbyutilizingthemotionoftheCOMandthedynamiccouplingbetweentheactuatedjointsandun-actuatedjoint.Throughthenumerical65iterationandoptimizationweobtainthemotionofthejointsangleduringthestancephase.1ModelingofhoppingrobotAsshowninFigure1,thehoppingrobotconsistsofthreesegments:atorso(segment1),alowerleg(segment2)andafoot(segment3).ThehipjointAandtheanklejointBdrivenbymotorsareactuatedjoints,whilethecontactbetweenthefootandthegroundisaun-actuatedjoint70whichisconsideredasavirtualjointC.Stancephase,duringwhichthehoppingrobothascontactwiththeground,iscomposedoftake-offphaseandtouch-downphase.Assumingthattherobotdoesn’tslipandbounce,thecontactbetweenthefootandthegroundisconsideredasahingejoint.Takingthegroundasthereferencesystem,fixedreferencecoordinatesystemcanbeestablishedasCxy,wheretheoriginiscontactpointC.Thelengthofthei-thlinkisli(i=1,2,3),andtherelative75anglebetweenlinksisq(idefinecounterclockwiseaspositive).Themassofi-thlinkismi,andthepositionofthecenterofmassislSi,themomentofinertialarounditscenterofmassisJi.ThedrivingtorqueofjointA,Bareτ1,τ2respectively.q1q2q3Fig.1Asketchofthehoppingrobot-2-
中国科技论文在线http://www.paper.edu.cnT80Usingq=[q1,q2,q3]asthegeneralizedcoordinatesofthesystem,accordingtotheLagrange’sequation,themotionequationsoftherobotduringstancearedescribedbyM()qq+C()q,qq+G()q=τ(1)Where,M(q)istheinertiamatrix,whichissymmetricandpositivedefinite;C()q,qdenotesthecentrifugalandCoriolismatrix;G(q)indicatesthegravitymatrix;τisthegeneralizedtorque85vectorexpressedasτ=[τ1,τ2,0]。Thethree-linkhoppingrobotisanunderactuatedsystemwhichhastwoactuatedjointsandoneun-actuatedjoint.Forsimplicity,thedynamicalequationcanbepartitionedintotwoequations:actuatedandun-actuatedpart.Maa()qqa+Map()qqp+Ca()q,qq+Ga()q=τa(2)90Mpa()qqa+Mpp()qqp+Cp()q,qq+Gp()q=0(3)Twhere,qaisactuatedjoints,qpisun-actuatedjoint,τa=[τ1,τ2]。SinceMppisalwaysnotzero,itsinverseexists.Thecouplingrelationsbetweenthetwo[12]actuatedjointsandtheoneun-actuatedjointisderivedbysolvingequation(3)asfollows,−1()[]()()()qp=−MppqMpaqqa+Cpq,qq+Gpq(4)95ThepositionofCOMoftherobotisgivenby:X=f()q(5)ThevelocityoftheCOMis:X=J()qq(6)=Ja()qqa+Jp()qqpwhere,JistheJacobianmatrixbetweenthevelocityoftheCOMandthevelocityofjoints,J=[Ja,100Jp].DifferentiationwithrespecttotimeyieldsthefollowingexpressionfortheaccelerationoftheCOMoftherobot:X=J()qq+Ja()qqa+Jp()qqp(7)Substitutingthecouplingrelations(4)into(6)andeliminatingaccelerationoftheun-actuated105jointyieldX=(J−JM−1M)q+Jq−JM−1(C+G)(8)appppaapppppTheequationcanbesimplifiedasJ′qa=X−B(9)where,J′=J−JM−1M,B=Jq−JM−1(C+G)appppappppp110Equation(9)canbeconsideredastherelationbetweentheaccelerationoftheCOMandtheaccelerationoftheactuatedjoints.2.MotionplanningTheobjectiveofthispaperistoplanthetrajectoriesofjointanglesaftergiventhetrajectoryoftheCOMduringstance,whiletherelationsbetweentheanglessatisfythedynamiccoupling115equation.[14]Accordingtoreference,thetrajectoryoftheCOMmustsatisfytheboundaryconstraintswhentherobotleavestheground.Themotionscanbeexpressedbypolynomialfunctionsx(t)andy(t).ThesolutiontothereferencetrajectoryoftheCOMisnotuniquebecausethattheJacobian120matrixisarectangularmatrix.TherelationshipbetweenthemotionofjointsangleandthetrajectoryofCOMisacomplicatednonlinearfunction,sotheanalyticalsolutionmaynotexist.Meanwhile,duetotheexistenceofun-actuatedjoint,therelationsbetweenactuatedand-3-
中国科技论文在线http://www.paper.edu.cnun-actuatedjointmustsatisfydynamiccoupling.Itisdifficulttoobtainthetrajectoryofthejointsanglesatisfyinggivenrequirementsbyanalyticalmethod.125Weusenumericalrecursivemethodtosolvethemotionplanningoftherobotinjointspace.ThetimeintervalisΔt,andweuseqi=q()i⋅Δttodiscretizethevariablesandintroduceincursivealgorithm:qi+1=qi+qiΔt(10)130qi+1=qi+qiΔt(11)Inordertominimizetheactuatedenergy,thefollowingperformanceindexduringthestancephaseisdefined,2J=τ(12)aFirst,accordingtotheaforementionedconstraints,thehorizontalandverticalmotionofthethCOMarederivedbyusing5orderpolynomial.Giventheinitialpositionandvelocityofthe135COM,theinitialvaluesofthejointangleandvelocitycanbecomputedbysolvingthekinematicequations(5)and(6).Nowtheequation(9)canbeconsideredasalinearequationrelatingtheaccelerationofactuatedjointstotheCOM.Accordingtotheverticalconstraint,i.e.thesecondlineofequation(9),weoptimizetheperformanceindex(10)toacquiretheaccelerationoftheactuatedjoints.Next,theaccelerationoftheun-actuatedjointiscomputedbysolvingthedynamic140couplingequationbetweentheactuatedjointsandun-actuatedjoint(4).Thejointangleq,velocityqwhicharetheinitialvaluesofthenextincursiveareobtainedbyadoptingtheincursivemethod.Finally,weobtainthemotionofeachjoint.TheflowdiagramisshowninFigure2.x,yq0,q0t=i⋅Δt2J=τaJ′,X−Bqaqpq,qi=i+1t≥TFig.2Theflowchartofmotionplanninginthejointspace.-4-
中国科技论文在线http://www.paper.edu.cn1453.SimulationresultsThestancetimeist=0.15s,andthetimeintervalisΔt=0.002s.ThemotionplanningoftheunderactuatedhoppingrobotisperformedusingMATLAB.ThephysicalparametersofthehoppingrobotareshowninTable1.Tab.1PhysicalparametersoftherobotLinki123linklengthli(m)0.110.260.174positionofthecenterlSi(m)0.110.1050.082linkmassmi(kg)4.240.060.14momentofinertiaIi(kg·m2)0.0340.00330.0038150Thepropermotionoftherobotisdependentonthejointspositionandvelocityattheinitialtimeofthemotionplanning.GiventheinitialpositionoftheCOMX0=[0,0.25],eachjointanglecanbeobtainedbysolvingthepositionequation(5)oftheCOM.Basedonthemotionoftheanimal,theangleCis155positive,theothertwoanglesarenegative.TheinitialjointanglesarechosenasTq0=[-1.7354,-1.4605,2.7141].SubstitutingtheinitialjointsangleoftherobotintothevelocityequationofCOM(6),theinitialjointsvelocityareobtainedbysolvingtheverticalvelocityequationoftheCOM.Whiley=0,thegeneralsolutionisq=[0.000049z−1.8795z,z,z]T,wherethez1,z2maybeany02112160constant.Throughmotionplanning,wecanobtainthetrajectoryoftheCOMandeachjointangle.ThetrajectoriesoftheCOMandtheconsecutivestickdiagramsoftherobotduringstancewhenthez1,z2arechosentobedifferentvaluesareshowninFigure3-4.Figure3showsthat:whentheverticaltrajectoryoftheCOMkeepsconstant,thevalueofthehorizontalinitialvelocityofthe165COMincreases(Figure5)withtheincrementoftheabsolutevalueofz1(orz2),sothehorizontaldisplacementincreases.WhenthehorizontalinitialvelocityoftheCOMispositive,therobotmovesforward,whiletherobotmovesbackwardifthevelocityisnegative.Butwhenthevelocityistoolarge,thetrackingerrorofverticalmotionoccursinthelastperiodduringstance,thepostureisimproper.FromFigure4wecanseethatwhenthevaluesofz1,z2arenegative,the170postureoftherobotisinaccordwithbiologicalmotion,thismomenttheselectedvalueofz1,z2areproperatthemoment.0.360.34z1=4z1=2z1=0z1=-2z1=-40.32z1=6z1=-60.3z1=-70.28Verticalpositiony(m)0.26-0.3-0.2-0.100.10.20.30.4Horizontalpositionx(m)(a)z2=0-5-
中国科技论文在线http://www.paper.edu.cn0.360.34z2=2z2=00.32z2=-2z2=4z2=-40.30.28Verticalpositiony(m)0.260.24-0.2-0.100.10.2Horizontalpositionx(m)175(b)z1=0Fig.3ThetrajectoriesoftheCOMunderdifferentinitialvelocity.Fig.4Thestickdiagramsoftherobotwhenz1,z2varyz2=0z1=022(m/s)(m/s)xx1100-1-1-2-2Horizontalvelocityv-5-4-3-2-1012345Horizontalvelocityv-5-4-3-2-1012345z1z2(a)(b)180Fig.5TheinitialvelocityoftheCOMinhorizontaldirection.Figure6showsthefeasibleverticaltrajectoryoftheCOMfortheproposedmotionplanningmethod.Thetrajectorycanbedividedintofourtypes:monotoneincreasing,monotonedecreasing,concaveandconvexcurves.Amongthemthemonotonedecreasingconcavecurve(d)corresponds185tothetouch-downphaseoftherobot,whilethemonotoneincreasingconcavecurvescorrespondstothetake-offphase.Thegeneralcurvecanbedecoupledintotheabovefourtypes,andeachcanbeplannedindependently.Whenthetrajectoryisexpressedbyonepolynomialfunction,theproposedmethodissuitableformorethansecondorderpolynomials.-6-
中国科技论文在线http://www.paper.edu.cn0.350.350.3y(m)0.30.250.25Verticalpositiony(m)00.050.10.1500.050.10.15Timet(s)Timet(s)(a)(b)0.250.250.2y(m)0.20.150.15Verticalpositiony(m)00.050.10.1500.050.10.15Timet(s)Timet(s)(c)(d)190Fig.6.Thefeasibletypesofcurves.(a)monotoneincreasingconvexcurve(b)monotoneincreasingconcavecurve(c)monotonedecreasingconvexcurve(d)monotonedecreasingconcavecurveThehorizontalandverticalpositionoftheglobalCOMversustimeandthestickdiagramsoftherobotduringstanceobtainedbymotionplanningareshowninFigure7-9.Figure9showsthatthegaitoftherobotaccordswiththeanimal’smotion,andtherobotmovessmoothly.Itproves195thattheproposedmethodisfeasible.FromFigure7and8,wecanseethatthereisnoerrorbetweenthegeneratedverticaltrajectoryanddesiredverticaltrajectory,butthereisanerrorinthehorizontaltrejectorytracking.Itprovesthattheunderactuatedrobotcannottrackarbitrarytrajectoryinthetaskspace.Aslongastheinitialjointangleandvelocityaregiven,thehorizontaltrajectoryoftheCOMcorrespondingtotheverticaltrajectoryisunique.desired0.3generated0.20.10Horizontalpositionx(m)00.050.10.15200Timet(s)Fig.7.ThehorizontaltrajectoryoftheCOM.0.36)generated0.34desired0.320.30.28Verticalpositiony(m0.2600.050.10.15Timet(s)Fig.8.TheverticaltrajectoryoftheCOM.-7-
中国科技论文在线http://www.paper.edu.cn0.30.2y(m)0.10-0.100.10.20.3x(m)205Fig.9.Theconsecutivestickdiagramsoftherobot.WhenthedesiredtrajectoryoftheCOMisthehorizontalandverticaltrajectorygeneratedbytheproposedmotionplanningmethod,thegeneratedtrajectoryoftheCOMisshowninFigure10.ThereisnoerrorexistbetweentheactualtrajectoryanddesiredtrajectoryoftheCOM.Thennomatterweadoptthehorizontalaccelerationandboththehorizontalandverticalaccelerationasthe210constraint,thecomputedresultisfeasible.Butwhenweadopttheoriginalhorizontalaccelerationasconstraint,thereisanerroroccurringinthesolvingprocess.ItdemonstratesthattheverticalmotionoftheCOMismoreimportantintheunderactuatedrobot’shoppingandthereisainternalmatchingrelationbetweenthehorizontalandverticalmotionoftheCOM.0.35generatedtrajectorydesiredtrajectory0.3Verticalpositiony(m)0.2500.050.10.15215Fig.10.ThetrajectoryoftheCOMobtainedbysecondoptimization.Figure11givesthejointtrajectoriesfortherobotwhichisobtainedbyoptimizationprocedure.ThejointCdecreaseswithtime,whilethehipjointincreaseswithtime.Thetorsomovesupwardwithtime,whichitconformstotheanimal’smotioninthetake-offphase.03q1q2-0.5q32.5(rad)2(rad),q31-12-1.51.5JointangleqJointangleq-2100.050.10.15Timet(s)220Fig11.Thejointtrajectoriesfortherobot.Figure12andFigure13showtheconsecutivestickdiagramsoftherobotandthemotionoftheCOMwhentheverticaltrajectoryoftheCOMmovesfrom0.35mto0.45m.Therangeofthe-8-
中国科技论文在线http://www.paper.edu.cnrobot’smovementissmall,andthehorizontalpositiononlymoves0.15mforward.ComparingFigure10(form0.25mto0.35m)andFigure13,thehighertheverticalpositonatinitialmoment,225theshorterthehorizontaldisplacementoftheCOMandthesmallerthechangesofthejointangles.Thetheoreticalmaximumverticalheightoftherobotis0.4991m.Atthemomenteachlinkoftherobotisinaverticalline,sotheproperrangeofmovementinverticaldirectionis0.15m~0.45m。0.40.3y(m)0.20.10-0.3-0.2-0.100.10.2x(m)Fig12.Theconsecutivestickdiagramsoftherobot.0.450.4Verticalpositiony(m)0.3500.050.10.15Horizontalpositionx(m)230Fig13.ThetrajectoryoftheCOM.WhentheinitialverticalpositionoftheCOMisthesame,thetrajectoryofCOMisdifferentwithvaryingofthetake-offheight.Figure14givesthetrajectoriesoftheCOMwhentherobotmovesfrom0.15mto0.45minverticaldirectionandthenleavetheground.Whenthetake-off235heightislowthan0.35m,thehorizontaldisplacementincreaseswiththeincrementofthetake-offheight;butwhenthetake-offheightislargethan0.35m,thehorizontaldisplacementdecreaseswiththeincrementofthetake-offheight.Itprovesthatthepropertakeoffheightislargerthan0.35mandthejumplengthdecreaseswiththeincrementofthejumpheight.0.50.20.250.450.30.350.40.40.350.450.30.25Verticalpositiony(m)0.200.050.10.150.20.250.30.35Horizontalpositionx(m)240Fig.14.ComparingofthegeneratedtrajectoriesoftheCOMunderdifferentaltitude.-9-
中国科技论文在线http://www.paper.edu.cn4.ConclusionBysolvingthecouplingequationbetweentheactuatedandun-actuatedjointandtheaccelerationequationoftheCOM,thepaperderivestherobot’saccelerationequationbetweentheactuatedjointsandtheCOM.Usingthenumericaliterationandoptimizationprocedurewiththe245verticalaccelerationequationoftheCOMastheconstraint,thejointtrajectoriesduringstancearegenerated.Theperformanceindexoftheoptimizationmethodistheactuatedenergy.Thesimulationresultsprovethat:(1)Theproposedmotionplanningmethodisfeasible,andthecomputationisquickandsimplebecausethewholesolvingprocessisnumericalcalculation.Aslongastheinitialpositionand250velocityoftherobotandtheverticaltrajectoryoftheCOMaregiven,thegaitportraitandthejointtrajectoriescanbeobtained.Themovementissmooth.(2)TheverticaltrajectoryoftheCOMcanbemonotoneincreasingandmonotonedecreasing,concaveandconvexcurves,etc.Thegeneralcurvecanbedecoupledintotheabovefourtypes,andeachcurvecanbeplannedindependently.Whenthetrajectoryisrepresentedbypolynimials,255theproposedmethodissuitableformorethansecondorderpolynomials.(3)WhentheveticaltrajecroryoftheCOMkeepsinvariable,thehorizontaldisplacementincreaseswiththeincrementoftheinitialvelocityoftheCOM.WhenthehorizontalinitialveloctiyoftheCOMispositive,therobotmovesforwrad;whenthevelocityisnegative,therobotmovesbackward.Butwhenthevelocityistoolarge,thetrackingerrorofverticaltrajectoryoccurs260inthelastperiodofthemovementandthepostureisinproper.(4)ThehighertheinitialverticalpositionoftheCOMis,thesmallerthehorizontaldisplacementis.Itshowsthatthereexistscontradictionbetweenthelongjumpandthehighjump.Theinitialverticalpositionisconstant.Whenthetake-offheightissmaller,thehorizontaldisplacementatthemomentjustbeforethefootleavethegroundincreaseswiththeincrementof265take-offheight;whenthetake-offheightislarger,thehorizontaldisplacementdecreaseswiththeincrementofthetake-offheight,namelythejumplengthdecreaseswiththeincrementofthejumpheight.(5)Theunderactuatedhoppingrobotcannottrackarbitrarytrajectoryinthetaskspace.ThereexistsmatchingrelationbetweenthehorizontalandverticaltrajectoryoftheCOM.Thevertical270trajectoryismoreimportantintherobothoppingcomparedwiththehorizontaltrajectory.Theproposedmotionplanningmethodcanbeextendedtootherplanarunderactuatedrobot.AcknowledgeThisworkwassupportedbytheSpecializedResearchFundfortheDoctoralProgramofHigherEducationofChina(GrantNumber.20136102130001)andtheNationalNaturalScience275FoundationofChina(GrantNumber.50975230).References[1]RaibertMH,HodginsJK.AnimationofDynamicLeggedLocomotion[J].AcmSiggraphComputerGraphics,1991;25(4):349-358.[2]RabinowiczAC,Rodriguez-MonteverdeD.,KaplanML.,BaudinetteRV.,HeegaardJH.Energyefficiencyof280kangaroolocomotionascharacteristicedbydynamicoptimization[C].12thConferenceoftheEuropeanSocietyofBiomechanics.Dublin,2000.98.[3]TajimaR,SugaK.MotionhavingaFlightPhase:ExperimentsInvolvingaOne-leggedRobot[C].Proceedingsofthe2006IEEE/RSJInternationalConferenceonIntelligentRobotsandSystems,Beijing,China,2006,1726-1731.285[4]OhashiE,OhnishiK.Hoppingheightcontrolforhoppingrobots[J].ElectricalEngineeringinJapan,2006.155(1):64-71.[5]Kajita,S,NagasakiT,KanekoK,YokoiK,TanieK.Ahoptowardsrunninghumanoidbiped[C].Proceedings-10-
中国科技论文在线http://www.paper.edu.cnofthe2004IEEEInternationalConferenceonRoboticsandAutomation,NewOrleans.LA,2004.629-635.[6]ParkLH,KwonO.ImpedanceControlforRunningofBipedRobots[C].Proceedingsofthe2003290IEEE/ASMEInternationalConferenceonAdvancedIntelligentMechatronics(AIM2003).Kobe,Japan,2003,944-949[7]AhmadiM.,BuehlerM.StableControlofaSimulatedOne-LeggedRunningRobotwithHipandLegCompliance[J].IEEETransactionsonRobotsandAutomation,1997.13(1):96-104.[8]AlbroJ.V.,BobrowJ.E.OptimalMotionPrimitivesfora5DOFExperimentalHopper[C].Proceedingsofthe2952001IEEEInternationalConferenceonRobotics8Automation,Seoul,Korea,2001.3630-3635[9]FujimotoY.Trajectorygenerationofbipedrunningrobotwithminimumenergyconsumption[C].Proceedingofthe2004IEEEInternationalConferenceonRoboticsandAutomation.2004.NewOrieans,LA,2004.3803-3808[10]BabicJ.,OmrcenD.,LenarcicJ.,Balanceandcontrolofhumaninspiredjumpingrobot[M],SpringerNetherlands,2005300[11]NagasakiT.,KajitaS.,KanekoK.,YokoiK.,TanieK.ARunningExperimentofHumanoidBiped[C].Proceedingsof2004IEEE/RSIInternationalConferenceonIntelligentRobotsandSystems.Sendai,Japan,2004.136-141[12]Spong,M.W.Underactuatedmechanicalsystems[M].//ControlProblemsinRoboticsandAutomation,SpringerBerlinHeidelberg,1998.135-150305[13]ShiriaevA.S,FreidovichL.B,SpongM.W.ControlledInvariantsandTrajectoryPlanningforUnderactuatedMechanicalSystems[J].IEEETransactionsonAutomaticControl,2014,59(9):2555-2561.[14]VermeulenJ.Trajectorygenerationforplanarhoppingandwalkingrobots:anobjectiveparameterandangularmomentumapproach[D].Belgium:VrijeUniversiteitBrussel,2004.310[15]BergermanM,YangshengX.Planningcollision-freemotionsforunderactuatedmanipulatorsinconstrainedconfigurationspace[C].Proceedingsofthe1997IEEEInternationalConferenceonRoboticsandAutomation,Albuquerque,NewMexico,1997.549-555.[16]LynchKM,ShiromaN,AraiH,TanieK.Collision-freetrajectoryplanningfora3-Dofrobotwithapassivejoint[J].InternationalJournalofRoboticsResearch,2000.19(12):1171-1984315[17]LucaADe,OrioloG,TrajectoryPlanningandControlforPlanarRobotswithPassiveLastJoint[J].TheInternationalJournalofRoboticsResearch2002,21(5-6):575-590.[18]YoshikawaT,KobayashiK,WatanabeT.Designofadesirabletrajectoryandconvergentcontrolfor3-DOFmanipulatorwithanonholonomicconstraint[C].Proceedingsofthe2000IEEEInternationalConferenceonRoboticsandAutomation.SanFrancisco,CA,2000.1805-1810.320[19]HeGuangping,LuZheng,WangFengxiang.Motionplanningandcontrolofunderactuatedredundantmanipulatorswithobstacleavoidance[J].ChineseJournalofMechanicalEngineering,2005,41(6):208-213.[20]WuTY,YehTJ,HsuBH.Trajectoryplanningofaone-leggedrobotperformingastablehop[J].TheInternationalJournalofRoboticsResearch,2011,30(8):1072-1091.325欠驱动弹跳机器人着地相运动规划孟祥艳,葛文杰(西北工业大学,机电学院,西安,710072)摘要:针对欠驱动机器人关节空间的运动规划问题,本文通过对机器人动力学模型的分析,330结合机器人主被动关节的动力学耦合关系,以及机器人质心加速度的运动方程,推导得出机器人主动关节加速度和质心加速度间的关系。采用数值求解的方法,以竖直方向加速度作为约束,通过优化的方法对机器人着地相关节空间运动规律进行规划,得到合理机器人各关节转角运动规律。仿真结果表明本文提出的方法是可行的,亦可推广到其它欠驱动机器人的运动规划。335关键词:弹跳机器人,欠驱动机器人,运动规划,着地相,优化中图分类号:TP242-11-'
您可能关注的文档
- 安徽巢北地区栖霞组臭灰岩段黄铁矿研究--形态及分布特征.pdf
- 家蚕BmPDCD2基因功能研究.pdf
- 岩溶地表水生系统不同季节的水化学昼夜变化特征及碳汇效应的研究--以重庆丰都雪玉洞流域地下水补给的水池为例.pdf
- 广东省碳排放与经济增长脱钩关系实证分析.pdf
- 微囊藻毒素合成酶McyG的N端结构域的结构研究.pdf
- 快充和超长稳定的高度互联Cu-Si合金纳米管锂离子电池阳极材料.pdf
- 提高环境质量的财政基础.pdf
- 星型网络下量子态的制备.pdf
- 棉花XTH基因家族全基因组鉴定及进化分析.pdf
- 武汉市腹泻婴幼儿隐孢子虫感染的分子流行病学调查.pdf
- 氧化石墨烯诱导再生丝素蛋白成胶.pdf
- 水通道蛋白的研究进展.pdf
- 活化方式对多孔活性生物炭材料的结构及电容性能的影响.pdf
- 温度对镁合金微动磨损行为影响研究.pdf
- 湖南省“四化”协同发展实证研究.pdf
- 漂浮式烘箱风嘴风速的研究.pdf
- 热熔法制备PCL基温敏性药物释放体系及其释药性能研究.pdf
- 热网损耗对热电联合系统风电消纳能力的影响.pdf
相关文档
- 施工规范CECS140-2002给水排水工程埋地管芯缠丝预应力混凝土管和预应力钢筒混凝土管管道结构设计规程
- 施工规范CECS141-2002给水排水工程埋地钢管管道结构设计规程
- 施工规范CECS142-2002给水排水工程埋地铸铁管管道结构设计规程
- 施工规范CECS143-2002给水排水工程埋地预制混凝土圆形管管道结构设计规程
- 施工规范CECS145-2002给水排水工程埋地矩形管管道结构设计规程
- 施工规范CECS190-2005给水排水工程埋地玻璃纤维增强塑料夹砂管管道结构设计规程
- cecs 140:2002 给水排水工程埋地管芯缠丝预应力混凝土管和预应力钢筒混凝土管管道结构设计规程(含条文说明)
- cecs 141:2002 给水排水工程埋地钢管管道结构设计规程 条文说明
- cecs 140:2002 给水排水工程埋地管芯缠丝预应力混凝土管和预应力钢筒混凝土管管道结构设计规程 条文说明
- cecs 142:2002 给水排水工程埋地铸铁管管道结构设计规程 条文说明