

- 1.11 MB
- 2022-04-22 13:44:20 发布
- 1、本文档共5页,可阅读全部内容。
- 2、本文档内容版权归属内容提供方,所产生的收益全部归内容提供方所有。如果您对本文有版权争议,可选择认领,认领后既往收益都归您。
- 3、本文档由用户上传,本站不保证质量和数量令人满意,可能有诸多瑕疵,付费之前,请仔细先通过免费阅读内容等途径辨别内容交易风险。如存在严重挂羊头卖狗肉之情形,可联系本站下载客服投诉处理。
- 文档侵权举报电话:19940600175。
'中国科技论文在线http://www.paper.edu.cn笼型转子无刷双馈电机数学模型分析#及实验研究*韩力,王斌,栗凯,王茂林,庄琼5(重庆大学输配电装备及系统安全与新技术国家重点实验室)摘要:无刷双馈电机(BrushlessDoubly-FedMachine,BDFM)具有变频器容量小、系统成本低、功率因数和转速调节灵活等优点,在变频调速驱动及变速恒频发电领域具有广阔的应用前景。本文针对一台带有公共笼条和公共端环的笼型转子BDFM样机,为研究其运行特10性,首先对BDFM的数学模型进行理论推导,再利用Matlab建模仿真;在此基础上,开展不同运行工况下的实验研究,得到样机转速以及定子功率绕组、控制绕组电流的波形,并与仿真结果进行对比和分析。结果表明,仿真波形与实验波形相符,说明仿真与实验结果的正确性,笼型转子BDFM具有良好的异步和同步运行特性,异步运行时转速随负载变化而变化,同步运行时可通过改变控制绕组频率实现变频调速。15关键词:无刷双馈电机;Matlab仿真;实验研究中图分类号:TM301.4;TM306;TM344.4MathematicalModelAnalysisandTestStudyofBDFMwithCageRotor20HANLi,WANGBin,LIKai,WANGMaolin,ZHUANGQiong(StateKeyLaboratoryofPowerTransmissionEquipment&SystemSecurityandNewTechnology)Abstract:BrushlessDouble-FedMachine(BDFM)hasmanyadvantages,suchassmallercapabilityofconverter,lowersystemcostandmoreflexibleadjustmentofpowerfactorandspeed.25BDFMhasgoodapplicablepotentialsinthecontrolfieldsofvariable-frequency-adjustable-speedmotorsandvariable-speed-constant-frequencygenerators.TostudytheoperatingperformancesofaBDFMprototypeofcagerotorwiththepublicbarandpublicendloop,themathematicmodelisdeducedtheoreticallyandsimulatedbyMatlab.Andthen,thesimulationsaboutthedifferentoperatingconditionsoftheprototypeareresearched.Furthermore,thespeedandthestatorcurrent30waveformsofpowerwindingandcontrolwindingunderdifferentoperatingconditionsaretestedbytheexperimentalplatformoftheprototype.Theresultsshowthatthewaveformsofsimulationsandexperimentsarecoincidentandcorrect,andtheBDFMwithcagerotorhasgoodperformancesinbothasynchronousandsynchronousoperations.Asynchronousoperationspeedchangeswiththechangeoftheload,synchronousoperationspeedcanbechangedbychangingthefrequencyof35thecontrolwinding.Keywords:brushlessdouble-fedmachine;Matlabsimulation;experimentresearch0引言无刷双馈电机(BrushlessDoubly-FedMachine,BDFM)相对于传统交流电机具有诸多40明显优势,可在异步、同步、双馈亚同步和双馈超同步等多种不同工况下稳定运行,在变频[1]调速驱动和变速恒频发电领域具有广泛的应用前景。目前,许多学者做了大量关于BDFM的研究,文献[2]对不同转子BDFM异步运行特性进行了对比,文献[3]分析了笼型转子BDFM启动特性,文献[4]对BDFM工作原理和电磁设基金项目:第七届重庆大学SRTP项目(CQU-SRTP-2015282),国家级大学生创新训练项目(201610611076)。作者简介:韩力(1963-),男,博士,教授,博士生导师,主要研究方向为电机与变压器的分析和优化设计、电机物理场的分析与计算、风力发电技术、永磁电机及其控制。.E-mail:hanli@cqu.edu.cn-1-
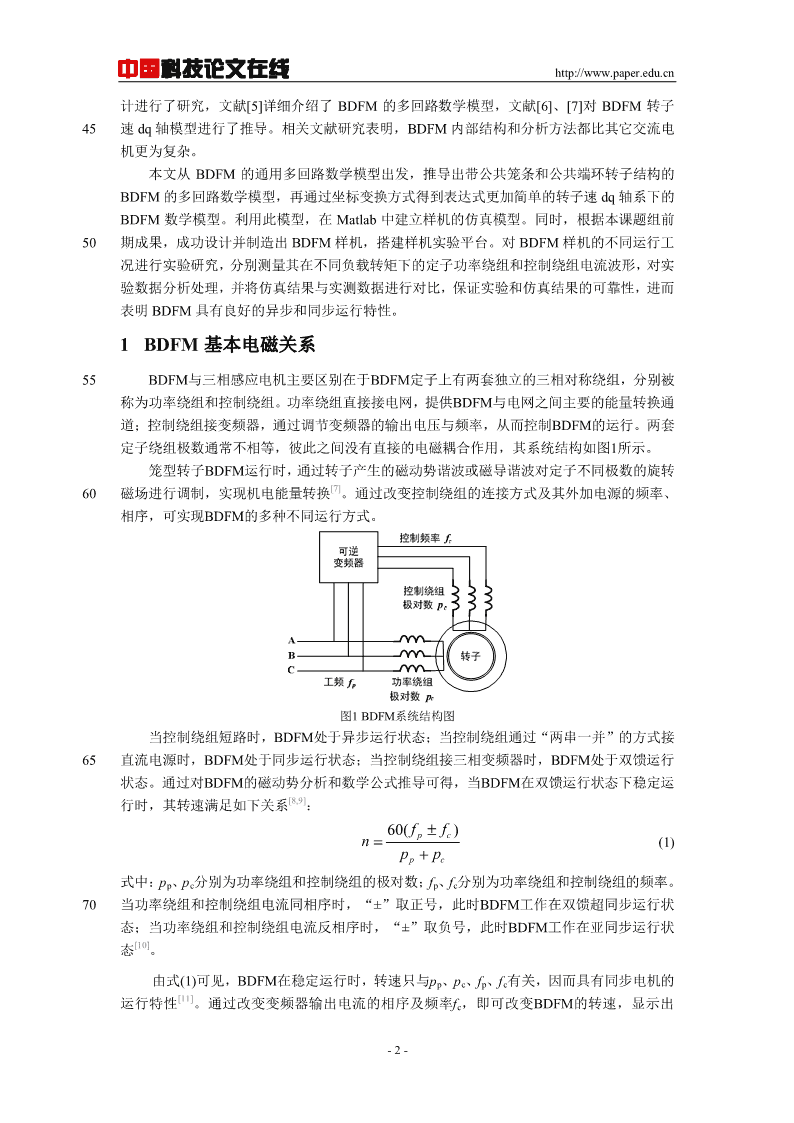
中国科技论文在线http://www.paper.edu.cn计进行了研究,文献[5]详细介绍了BDFM的多回路数学模型,文献[6]、[7]对BDFM转子45速dq轴模型进行了推导。相关文献研究表明,BDFM内部结构和分析方法都比其它交流电机更为复杂。本文从BDFM的通用多回路数学模型出发,推导出带公共笼条和公共端环转子结构的BDFM的多回路数学模型,再通过坐标变换方式得到表达式更加简单的转子速dq轴系下的BDFM数学模型。利用此模型,在Matlab中建立样机的仿真模型。同时,根据本课题组前50期成果,成功设计并制造出BDFM样机,搭建样机实验平台。对BDFM样机的不同运行工况进行实验研究,分别测量其在不同负载转矩下的定子功率绕组和控制绕组电流波形,对实验数据分析处理,并将仿真结果与实测数据进行对比,保证实验和仿真结果的可靠性,进而表明BDFM具有良好的异步和同步运行特性。1BDFM基本电磁关系55BDFM与三相感应电机主要区别在于BDFM定子上有两套独立的三相对称绕组,分别被称为功率绕组和控制绕组。功率绕组直接接电网,提供BDFM与电网之间主要的能量转换通道;控制绕组接变频器,通过调节变频器的输出电压与频率,从而控制BDFM的运行。两套定子绕组极数通常不相等,彼此之间没有直接的电磁耦合作用,其系统结构如图1所示。笼型转子BDFM运行时,通过转子产生的磁动势谐波或磁导谐波对定子不同极数的旋转[7]60磁场进行调制,实现机电能量转换。通过改变控制绕组的连接方式及其外加电源的频率、相序,可实现BDFM的多种不同运行方式。图1BDFM系统结构图当控制绕组短路时,BDFM处于异步运行状态;当控制绕组通过“两串一并”的方式接65直流电源时,BDFM处于同步运行状态;当控制绕组接三相变频器时,BDFM处于双馈运行状态。通过对BDFM的磁动势分析和数学公式推导可得,当BDFM在双馈运行状态下稳定运[8,9]行时,其转速满足如下关系:60(f±f)pcn=(1)p+ppc式中:pp、pc分别为功率绕组和控制绕组的极对数;fp、fc分别为功率绕组和控制绕组的频率。70当功率绕组和控制绕组电流同相序时,“±”取正号,此时BDFM工作在双馈超同步运行状态;当功率绕组和控制绕组电流反相序时,“±”取负号,此时BDFM工作在亚同步运行状[10]态。由式(1)可见,BDFM在稳定运行时,转速只与pp、pc、fp、fc有关,因而具有同步电机的[11]运行特性。通过改变变频器输出电流的相序及频率fc,即可改变BDFM的转速,显示出-2-
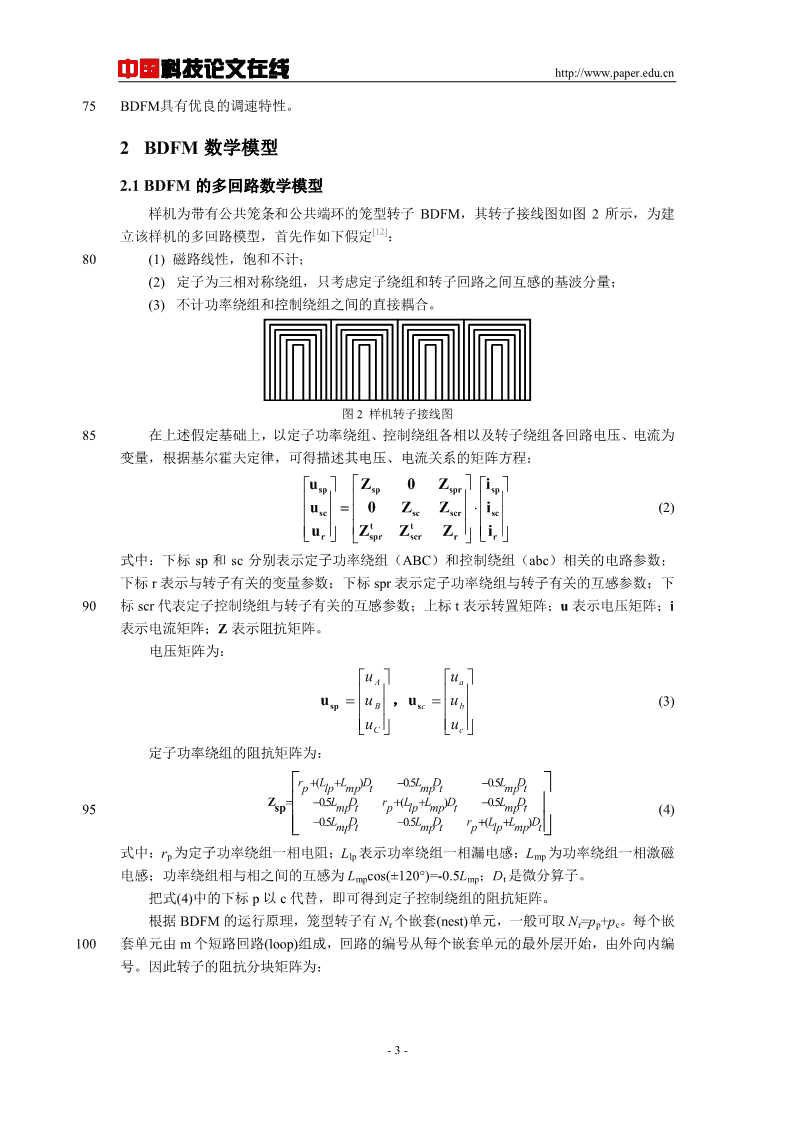
中国科技论文在线http://www.paper.edu.cn75BDFM具有优良的调速特性。2BDFM数学模型2.1BDFM的多回路数学模型样机为带有公共笼条和公共端环的笼型转子BDFM,其转子接线图如图2所示,为建[12]立该样机的多回路模型,首先作如下假定:80(1)磁路线性,饱和不计;(2)定子为三相对称绕组,只考虑定子绕组和转子回路之间互感的基波分量;(3)不计功率绕组和控制绕组之间的直接耦合。图2样机转子接线图85在上述假定基础上,以定子功率绕组、控制绕组各相以及转子绕组各回路电压、电流为变量,根据基尔霍夫定律,可得描述其电压、电流关系的矩阵方程:uspZsp0Zsprispu=0ZZ⋅i(2)scscscrscuZtZtZirsprscrrr式中:下标sp和sc分别表示定子功率绕组(ABC)和控制绕组(abc)相关的电路参数;下标r表示与转子有关的变量参数;下标spr表示定子功率绕组与转子有关的互感参数;下90标scr代表定子控制绕组与转子有关的互感参数;上标t表示转置矩阵;u表示电压矩阵;i表示电流矩阵;Z表示阻抗矩阵。电压矩阵为:uAuau=u,u=u(3)spBscbuuCc定子功率绕组的阻抗矩阵为:rp+(Llp+Lmp)Dt−0.5LmpDt−0.5LmpDt95Zsp=−0.5LmpDtrp+(Llp+Lmp)Dt−0.5LmpDt(4)−0.5LmpDt−0.5LmpDtrp+(Llp+Lmp)Dt式中:rp为定子功率绕组一相电阻;Llp表示功率绕组一相漏电感;Lmp为功率绕组一相激磁电感;功率绕组相与相之间的互感为Lmpcos(±120°)=-0.5Lmp;Dt是微分算子。把式(4)中的下标p以c代替,即可得到定子控制绕组的阻抗矩阵。根据BDFM的运行原理,笼型转子有Nr个嵌套(nest)单元,一般可取Nr=pp+pc。每个嵌100套单元由m个短路回路(loop)组成,回路的编号从每个嵌套单元的最外层开始,由外向内编号。因此转子的阻抗分块矩阵为:-3-
中国科技论文在线http://www.paper.edu.cnZ11Z1mZ=Z(5)rijZZm1mm其中,Zij(Nr×Nr)为子矩阵,表示转子绕组中所有Nr个单元的第i个短路回路与第j个短路回路之间的互感矩阵,一个典型子矩阵Zij为:""""rij+LijDt−rij−(Lij+Mij)Dt−rij−(Lij+Mij)Dt−r"−(L"+M)Dr+LD−r"−(L"+M)DZ=ijijijtijijtijijijt105ij(6)""""−r−(L+M)D−r−(L+M)Dr+LDijijijtijijijtijijt式中:rij(当i=j时)为转子回路的电阻;rij(当i≠j时)为公共端环的电阻;Lij(当i=j时)为转子回路的自感,Lij(当i≠j时)为同一嵌套单元内的第i号和第j号转子回路间的互感;Mij(当i=j时)为不同嵌套单元中相同编号转子回路的互感,而Mij(i≠j)为不同嵌套单元中的第i号和第j号转子线圈间的互感。带撇的量表示笼型转子公共导条形成的互阻抗。110定子功率绕组和转子绕组之间的互感分块矩阵为:Zspr=Dt[Lspr1Lspr2Lsprm](7)上式中,每一个子矩阵表示定子功率绕组和转子不同单元中相同编号绕组间的互感,为3×Nr阶。同理,定子控制绕组和转子绕组之间的互感分块矩阵为:115Z=D[]LLL(8)scrtscr1scr2scrm式中,每一个子矩阵表示定子控制绕组和转子不同单元中相同编号绕组间的互感,为3×Nr阶。对于线性磁路,利用磁共能和虚位移法,可求得电磁转矩:t∂ZsprT=[]i[]i(9)esr∂θZrscr120机械运动方程为:Jdω/dt=T−T−kω(10)reLr式中:J为转子的转动惯量,k为阻尼系数,Te为电磁转矩,TL为负载转矩。式(2)-(10)组成了BDFM多回路数学模型,利用上述模型可计算BDFM的稳态和动态性能。多回路数学模型能够很好地反映BDFM中的电流分布情况,但由于其变量较多较复杂,不125利于建模仿真,因此有必要对其进行简化2.2BDFM的dq轴模型[13][14]采用功率不变的变换矩阵,把多回路电压方程降阶,可得到BDFM的dq轴模型,如式(11)-(13)所示。电压方程为:-4-
中国科技论文在线http://www.paper.edu.cnUqprp+LpDtppωrLp00MprDtppωrMprIqpUdp−ppωrLprp+LpDt00−ppωrMprMprDtIdp130Uqc00rc+LcDtpcωrDt−McrDtpcωrMcrIqc(11)=⋅Udc00−pcωrLcrc+LcDtpcωrMcrMcrDtIdc0MprDt0−McrDt0rr+LrDt0Iqr00MprDt0McrDt0rr+LrDtIdr式中:rp、Lp、Mpr分别为功率绕组的电阻、自感、与转子的互感;rc、Lc、Mcr分别为控制绕组的电阻、自感、与转子的互感;rr、Lr、ωr分别为转子电阻、自感、BDFM的机械角速度;Uqp、Udp、Uqc、Udc、Uqr、Udr、Iqp、Idp、Iqc、Idc、Iqr、Idr分别为定子功率绕组电压瞬态值的q轴和d轴分量、定子控制绕组电压瞬态值的q轴和d轴分量、转子绕组电压瞬态值的135q轴和d轴分量、定子功率绕组电流瞬态值的q轴和d轴分量、定子控制绕组电流瞬态值的q轴和d轴分量、转子绕组电流瞬态值的q轴和d轴分量;Dt为对时间的导数。电磁转矩方程为:Te=ppMpr(IqpIdr-IdpIqr)+pcMcr(IqcIdr+IdcIdr)=Tep+Tec(12)式中:Tep、Tec分别为功率绕组、控制绕组产生的电磁转矩。140机械运动方程为:Jdω/dt=T−T−kω(13)reLr3不同工况下的实验与仿真对比利用式(11)-(13)在Matlab/Simulink中搭建BDFM的仿真模型,通过改变负载和控制绕组的状态实现不同运行工况下的仿真。其模型如图3所示。145图3BDFM仿真模型框图根据实验需求,搭建BDFM样机实验平台,样机pp=3、pc=1,利用直流发电机作为负载,通过扭矩转速传感器监控负载大小和样机转速,示波器观察和记录样机不同运行工况下的电流波形,实验平台如图4所示。150图4BDFM实验平台-5-
中国科技论文在线http://www.paper.edu.cn3.1转速对比由上文的理论分析可知,通过改变控制绕组状态,可以改变BDFM的运行工况。在不同仿真运行工况下,对其施加不同的负载转矩,研究其运行特性,仿真内容如表1所示。155表1BDFM仿真运行工况控制绕组状态仿真运行工况运行时间/s负载转矩/N·m0-325短路异步运行3-6356-91020V直流电压同步运行9-122012-151050V/5Hz反相序电压亚同步运行15-182018-211050V/5Hz正相序电压超同步运行21-2420根据上表列写的仿真内容,对BDFM进行仿真,得到电机的仿真转速曲线,具体内容如图5所示。图5转速仿真曲线160为了使仿真和实验结果具有可对比性,使样机在同一运行条件下进行实验,分别与仿真结果进行对比,样机的实验内容以及测得的样机转速如表2所示。表2样机实验内容-1控制绕组状态运行状态负载转矩/N·m样机转速n/r.min25737.5短路异步运行35703.210750.220V直流电压同步运行20750.110675.350V/5Hz反相序电压亚同步运行20675.110824.950V/5Hz正相序电压超同步运行20824.63.1.1异步运行状态的对比当负载转矩为25N·m时,仿真fp=50Hz、fc=1.3Hz,通过式(1)算得转速n1=730.5r/min,而165实际仿真转速为731r/min;样机实测fp=50.9Hz、fc=1.6Hz,通过式(1)算得转速n2=739.5r/min,而样机实测转速为737.5r/min。当负载转矩为35N·m时,仿真fp=50Hz、fc=2.8Hz,通过式(1)算得转速n1=708r/min,而实际仿真转速为708r/min;样机实测fp=49.9Hz、fc=3.1Hz,通过式(1)算得转速n2=702r/min,而样机实测转速为703.2r/min。1703.1.2同步运行状态的对比当负载转矩为10N·m时,仿真fp=50Hz、fc=0Hz,通过式(1)算得转速n1=750r/min,而其仿真转速为750r/min,样机实测转速为750.2r/min。当负载转矩增加为20N·m时,样机转速保持不变。-6-
中国科技论文在线http://www.paper.edu.cn3.1.3亚同步运行状态的对比175当负载转矩为10N·m时,仿真fp=50Hz、fc=5Hz,通过式(1)算得转速n1=675r/min,而其仿真转速为675r/min,样机实测转速为675.3r/min。当负载转矩增加为20N·m时,样机实测转速为675.1r/min。3.1.4超同步运行状态的对比当负载转矩为10N·m时,仿真fp=50Hz、fc=5Hz,通过式(1)算得转速n1=825r/min,对应180的仿真转速为825r/min,而样机实测转速为824.9r/min。当负载转矩增加为20N·m时,样机实测转速为824.6r/min。通过以上4种不同运行状态下的转速对比,什么仿真结果与实验数据吻合。3.2电流对比3.2.1异步运行状态的对比185当负载转矩为25N·m时,样机在异步运行状态下功率绕组和控制绕组电流的仿真波形与实验波形对比如图6、图7所示。由此可见,仿真fp=50Hz、fc=1.3Hz,仿真Ip幅值为12.5A,而样机实测Ip幅值为12.1A;仿真Ic幅值为3A,而样机实测Ic幅值为2.8A。(a)仿真波形(b)实验波形190图6异步运行时功率绕组电流对比(a)仿真波形(b)实验波形图7异步运行时控制绕组电流对比3.2.2同步运行状态的对比195当负载转矩为10N·m时,样机在同步运行状态下功率绕组的仿真波形与实验波形对比如图8所示。由此可见,仿真fp=50Hz、fc=0Hz,仿真Ip幅值为8A,而样机实测Ip幅值为8.5A,仿真值与实测值接近。-7-
中国科技论文在线http://www.paper.edu.cn(a)仿真波形(b)实验波形200图8同步运行时功率绕组电流对比3.2.3亚同步运行状态的对比当负载转矩为10N·m时,样机在亚同步运行状态下功率绕组和控制绕组电流的仿真波形与实验波形对比如图9、图10所示。由此可见,仿真fp=50Hz、fc=5Hz,仿真Ip幅值为10A,而样机实测Ip幅值为9A;仿真Ic幅值为4.8A,而样机实测Ic幅值为5.5A。205(a)仿真波形(b)实验波形图9亚同步运行时功率绕组电流对比(a)仿真波形(b)实验波形210图10亚同步运行时控制绕组电流对比3.2.4超同步运行状态的对比当负载转矩为10N·m时,样机在超同步运行状态下功率绕组和控制绕组电流的仿真波形与实验波形对比如图11、图12所示。由此可见,仿真fp=50Hz、fc=5Hz,仿真Ip幅值为7.5A,而样机实测Ip幅值为8A;仿真Ic幅值为10A,而样机实测Ic幅值为10A。215(a)仿真波形(b)实验波形图11超同步运行功率绕组电流对比-8-
中国科技论文在线http://www.paper.edu.cn(a)仿真波形(b)实验波形220图12超同步运行控制绕组电流对比通过以上异步、同步、亚同步和超同步不同运行工况电流的对比可见,仿真结果与样机实验数据基本吻合。4结论本文从BDFM的数学模型出发,建立了笼型转子BDFM的仿真模型,针对样机的不同运225行工况展开了仿真,并利用BDFM样机和测试设备,搭建了BDFM样机实验平台,测试了不同运行工况下的转速及定子电流波形。得到以下结论:①仿真结果与实验数据基本吻合,说明笼型转子BDFM建模与仿真结果的正确性。②BDFM在异步运行时,转速随负载转矩的增大而下降,具有异步电机的运行特性。③BDFM在双馈运行时,可通过调节变频器的输出频率及相序,实现样机转速的连续平230滑调节,且保持转速稳定,具有同步电机的运行特点。[参考文献](References)[1]陈志伟,杨向宇,申辉阳.无刷双馈电机及其调速系统的发展[J].微特电机.2006,(09):37-40.[2]武潇,王淑红,吕航,韩广飞.不同转子无刷双馈电机异步运行特性对比[J].微特电机.2014,42(5):40-44.[3]邓先明,姜建国.无刷双馈电机的工作原理及电磁设计[J].中国电机工程学报,2003,23(11):126-132.235[4]邓先明,张海忠,拾华杰,笼形转子无刷双馈电机启动特性分析[J].电机与控制学报,2008,12(5):545-549.[5]WallaceAK,SpeeR,LauwHK.Dynamicmodelingofbrushlessdoubly-fedmachines[C]//IndustryApplicationsSocietyMeeting,1989.ConferenceRecordofthe.IEEEXplore,1989:329-334vol.1.[6]LiR,WallaceA,SpeeR,etal.Two-axismodeldevelopmentofcage-rotorbrushlessdoubly-fedmachines[J].EnergyConversionIEEETransactionson,1991,6(3):453-460.240[7]陈志伟,杨向宇,申辉阳.SPWM逆变器供电的无刷双馈电机调速系统仿真[J].微特电机,2004,7:11-13.[8]WilliamsonS,FerreiraAC,WallaceAK.Generalizedtheoryofthebrushlessdoubly-fedmachine-part1-analysis[J].IEEProceedingsElectricPowerApplications,1997,144(2):111-122.[9]WilliamsonS,FerreiraAC.Generalizedtheoryofthebrushlessdoubly-fedmachine-part2-modelverificationandperformance[J].IEEProceedingsElectricPowerApplications,1997,144(2):123-12.245[10]邓先明.无刷双馈电机的电磁分析与设计应用[M].北京:机械工业出版社,2009:103-135.[11]张惺,何志伟.无刷双馈电机起动与运行特性研究[J].防爆电机,2009,44(151):35-36.[12]王爱龙.无刷双馈电机的数学模型和有限元仿真[D].太原理工大学,2008.[13]PozaJ,OyarbideE,RoyeD,etal.Unifiedreferenceframedqmodelofthebrushlessdoublyfedmachine[J].ElectricPowerApplications,IEEProceedings,2006,153(5):726-734.250[14]韩力,罗杰,王华,潘红广.无刷双馈电机稳态数学模型和运行特性分析[J].重庆大学学报,2013,(08):61-67.-9-'
您可能关注的文档
- 温度对镁合金微动磨损行为影响研究.pdf
- 湖南省“四化”协同发展实证研究.pdf
- 漂浮式烘箱风嘴风速的研究.pdf
- 热熔法制备PCL基温敏性药物释放体系及其释药性能研究.pdf
- 热网损耗对热电联合系统风电消纳能力的影响.pdf
- 理论计算钒同位素在溶液中的分馏.pdf
- 癌症相关indels的数据库构建及其特征分析.pdf
- 硫化氢合成酶在SVZ区神经干细胞中的表达鉴定及硫化氢对神经干细胞增殖的影响.pdf
- 神经电生理检测推拿对CCI大鼠感觉功能的影响.pdf
- 经理人公平偏好对管理防御行为影响的实验研究.pdf
- 经理管理防御、股权激励与企业风险承担.pdf
- 羧甲基壳聚糖基胶束的制备工艺及其缓释性研究.pdf
- 自主创新、模仿创新对我国高技术产业竞争力的影响研究.pdf
- 苯达松在三种典型土壤中的吸附与淋溶.pdf
- 螺杆式双级冷凝器空气源热泵供暖系统模拟研究.pdf
- 表面改性强化微粉煤脱硫试验研究.pdf
- 论公共服务供给侧改革的价值目标.pdf
- 论实验动物腧穴的发展阶段.pdf
相关文档
- 施工规范CECS140-2002给水排水工程埋地管芯缠丝预应力混凝土管和预应力钢筒混凝土管管道结构设计规程
- 施工规范CECS141-2002给水排水工程埋地钢管管道结构设计规程
- 施工规范CECS142-2002给水排水工程埋地铸铁管管道结构设计规程
- 施工规范CECS143-2002给水排水工程埋地预制混凝土圆形管管道结构设计规程
- 施工规范CECS145-2002给水排水工程埋地矩形管管道结构设计规程
- 施工规范CECS190-2005给水排水工程埋地玻璃纤维增强塑料夹砂管管道结构设计规程
- cecs 140:2002 给水排水工程埋地管芯缠丝预应力混凝土管和预应力钢筒混凝土管管道结构设计规程(含条文说明)
- cecs 141:2002 给水排水工程埋地钢管管道结构设计规程 条文说明
- cecs 140:2002 给水排水工程埋地管芯缠丝预应力混凝土管和预应力钢筒混凝土管管道结构设计规程 条文说明
- cecs 142:2002 给水排水工程埋地铸铁管管道结构设计规程 条文说明